 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics meets Fluid Dynamics: A Characterization of the Induced Airflow around a Quadrotor
Paper and Code
Mar 20, 2024
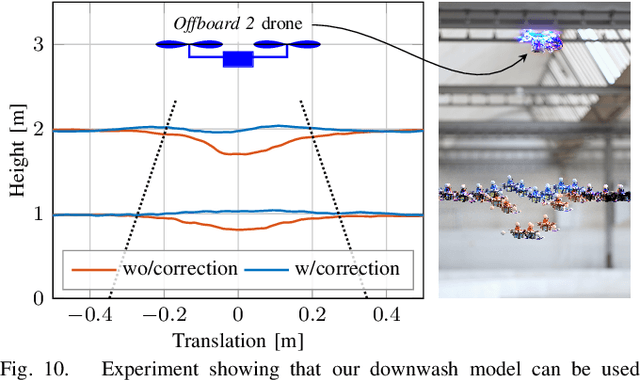


The widespread adoption of quadrotors for diverse applications, from agriculture to public safety, necessitates an understanding of the aerodynamic disturbances they create. This paper introduces a computationally lightweight model for estimating the time-averaged magnitude of the induced flow below quadrotors in hover. Unlike related approaches that rely on expensive computational fluid dynamics (CFD) simulations or time-consuming empirical measurements, our method leverages classical theory from turbulent flows. By analyzing over 9 hours of flight data from drones of varying sizes within a large motion capture system, we show that the combined flow from all propellers of the drone is well-approximated by a turbulent jet. Through the use of a novel normalization and scaling, we have developed and experimentally validated a unified model that describes the mean velocity field of the induced flow for different drone sizes. The model accurately describes the far-field airflow in a very large volume below the drone which is difficult to simulate in CFD. Our model, which requires only the drone's mass, propeller size, and drone size for calculations, offers a practical tool for dynamic planning in multi-agent scenarios, ensuring safer operations near humans and optimizing sensor placements.