 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Template Library
Paper and Code
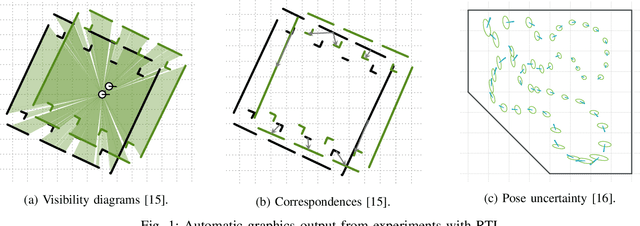
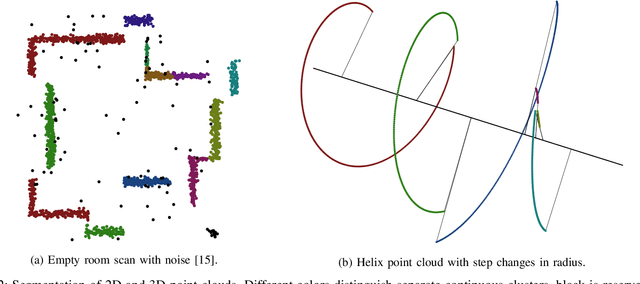
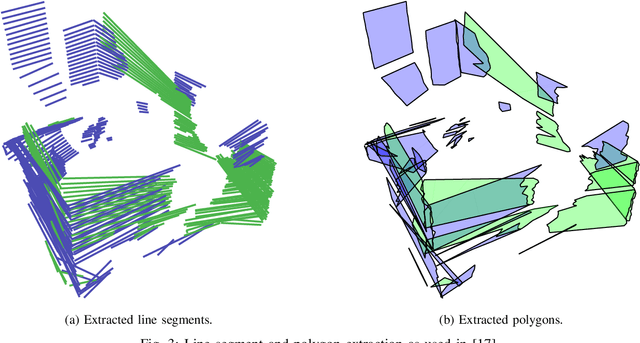

Robotic Template Library (RTL) is a set of tools for dealing with geometry and point cloud processing, especially in robotic applications. The software package covers basic objects such as vectors, line segments, quaternions, rigid transformations, etc., however, its main contribution lies in the more advanced modules: The segmentation module for batch or stream clustering of point clouds, the fast vectorization module for approximation of continuous point clouds by geometric objects of higher grade and the LaTeX export module enabling automated generation of high-quality visual outputs. It is a header-only library written in C++17, uses the Eigen library as a linear algebra back-end, and is designed with high computational performance in mind. RTL can be used in all robotic tasks such as motion planning, map building, object recognition and many others, but the point cloud processing utilities are general enough to be employed in any field touching object reconstruction and computer vision applications as well.