 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Room Traversal using Optical Range Finding
Paper and Code
Apr 17, 2020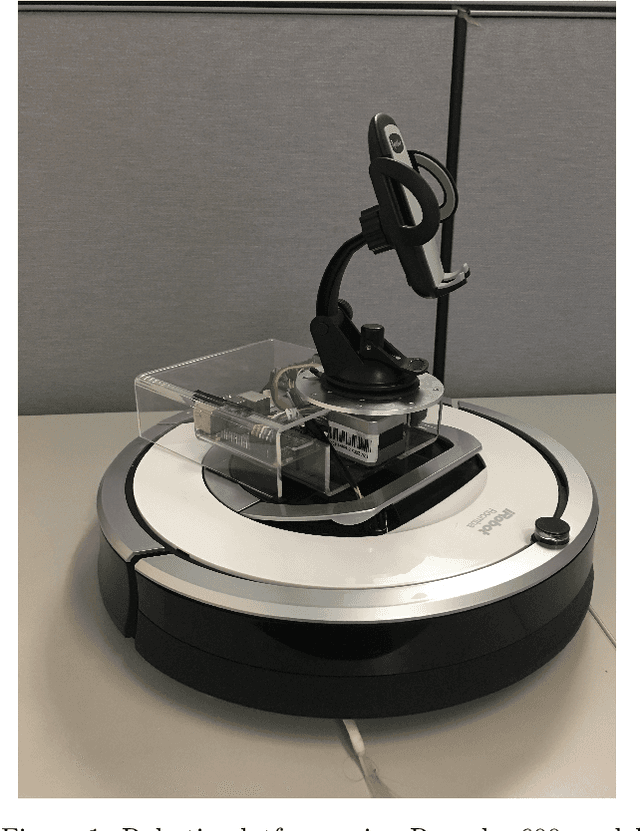


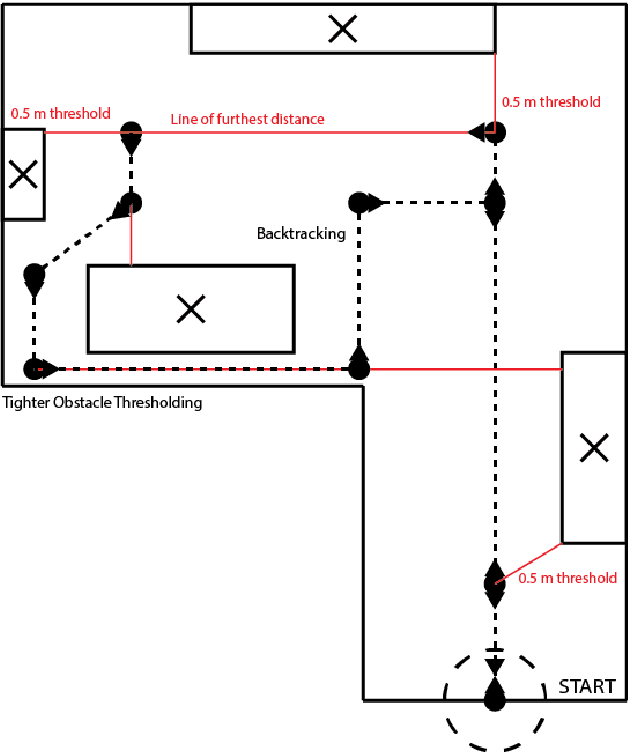
Consider the goal of visiting every part of a room that is not blocked by obstacles. Doing so efficiently requires both sensors and planning. Our findings suggest a method of inexpensive optical range finding for robotic room traversal. Our room traversal algorithm relies upon the approximate distance from the robot to the nearest obstacle in 360 degrees. We then choose the path with the furthest approximate distance. Since millimeter-precision is not required for our problem, we have opted to develop our own laser range finding solution, in lieu of using more common, but also expensive solutions like light detection and ranging (LIDAR). Rather, our solution uses a laser that casts a visible dot on the target and a common camera (an iPhone, for example). Based upon where in the camera frame the laser dot is detected, we may calculate an angle between our target and the laser aperture. Using this angle and the known distance between the camera eye and the laser aperture, we may solve all sides of a trigonometric model which provides the distance between the robot and the target.