 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Mobility Diversity Algorithm with Continuous Search Space
Paper and Code
May 21, 2018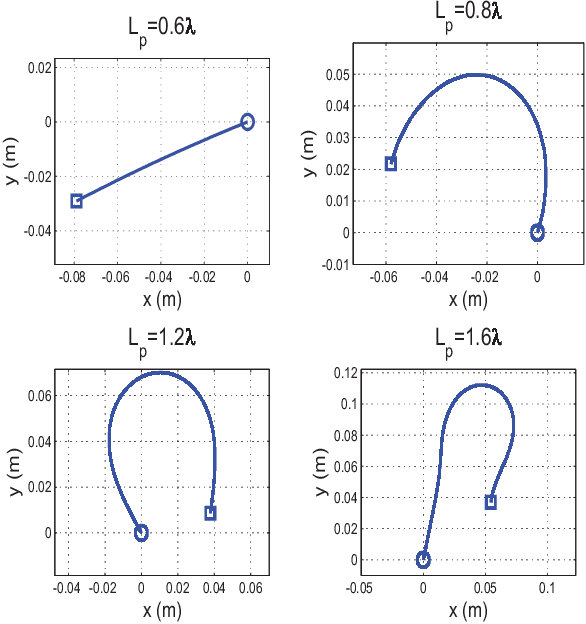
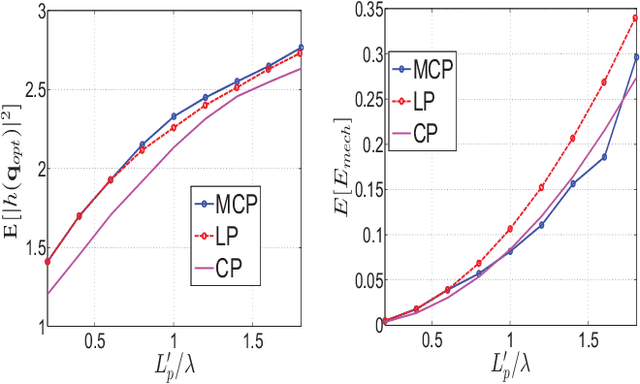
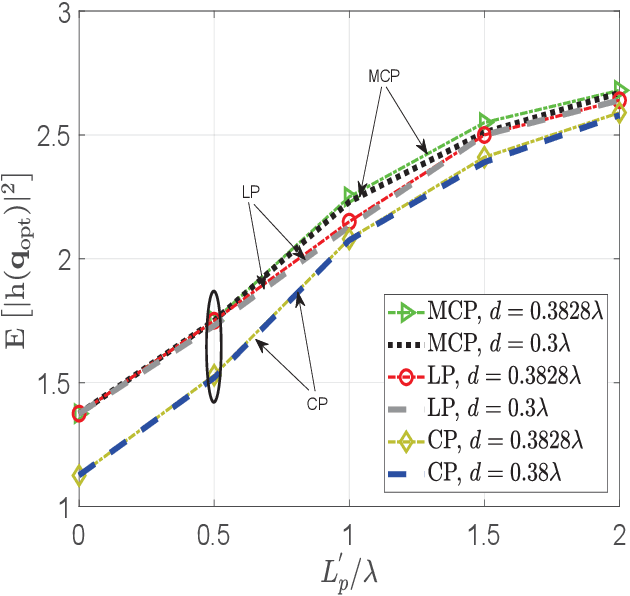
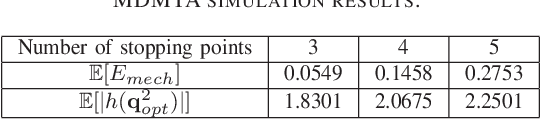
Small scale fading makes the wireless channel gain vary significantly over small distances and in the context of classical communication systems it can be detrimental to performance. But in the context of mobile robot (MR) wireless communications, we can take advantage of the fading using a mobility diversity algorithm (MDA) to deliberately locate the MR at a point where the channel gain is high. There are two classes of MDAs. In the first class, the MR explores various points, stops at each one to collect channel measurements and then locates the best position to establish communications. In the second class the MR moves, without stopping, along a continuous path while collecting channel measurements and then stops at the end of the path. It determines the best point to establish communications. Until now, the shape of the continuous path for such MDAs has been arbitrarily selected and currently there is no method to optimize it. In this paper, we propose a method to optimize such a path. Simulation results show that such optimized paths provide the MDAs with an increased performance, enabling them to experience higher channel gains while using less mechanical energy for the MR motion.