 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Sequential Decision Making using LSTM-based Learning and Logical-probabilistic Reasoning
Paper and Code
Jan 16, 2019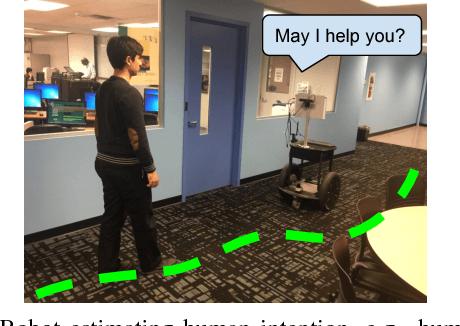

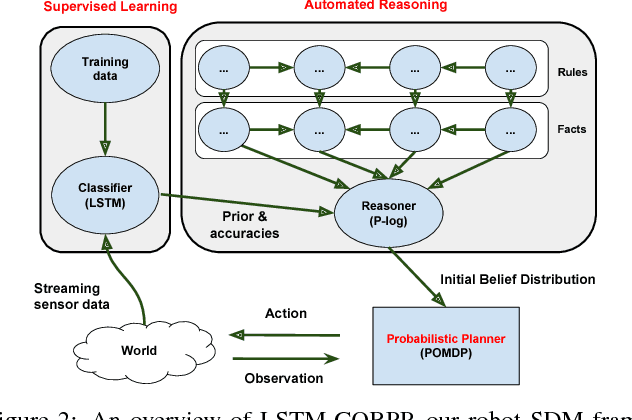
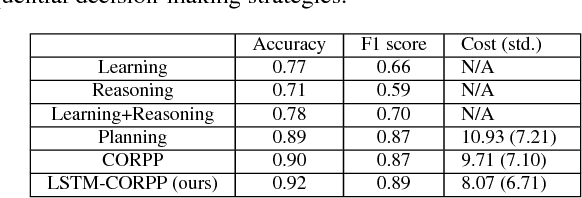
Sequential decision-making (SDM) plays a key role in intelligent robotics, and can be realized in very different ways, such as supervised learning, automated reasoning, and probabilistic planning. The three families of methods follow different assumptions and have different (dis)advantages. In this work, we aim at a robot SDM framework that exploits the complementary features of learning, reasoning, and planning. We utilize long short-term memory (LSTM), for passive state estimation with streaming sensor data, and commonsense reasoning and probabilistic planning (CORPP) for active information collection and task accomplishment. In experiments, a mobile robot is tasked with estimating human intentions using their motion trajectories, declarative contextual knowledge, and human-robot interaction (dialog-based and motion-based). Results suggest that our framework performs better than its no-learning and no-reasoning versions in a real-world office environment.