 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboMem: Giving Long Term Memory to Robots
Paper and Code
Mar 23, 2020
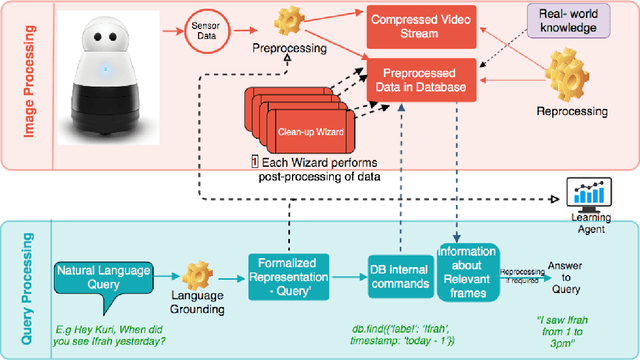

Robots have the potential to improve health monitoring outcomes for the elderly by providing doctors, and caregivers with information about the person's behavior, health activities and their surrounding environment. Over the years, less work has been done to enable robots to preserve information for longer periods of time, on the order of months and years of data, and use this contextual information to answer queries. Time complexity to process this massive sensor data in a timely fashion, inability to anticipate the future queries in advance and imprecision involved in the results have been the main impediments in making progress in this area. We make a contribution by introducing RoboMem, a query answering system for health-care assistance of elderly over long term; continuous data feeds that intends to overcome the challenges of giving long term memory to robots. The design for our framework preprocesses the sensor data and stores this preprocessed data into the database. This data is updated in the database by going through successive refinements, improving its accuracy for responding to queries. If data in the database is not enough to answer a query, a small set of relevant frames (also obtained from the database) will be reprocessed to obtain the answer. [Our initial prototype of RoboMem stores 3.5MB of data in the database as compared to 535.8MB of actual video frames and with minimal data in the database it is able to fetch information fundamental to respond to queries in 0.0002 seconds on average].