 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobobarista: Object Part based Transfer of Manipulation Trajectories from Crowd-sourcing in 3D Pointclouds
Paper and Code
Sep 18, 2015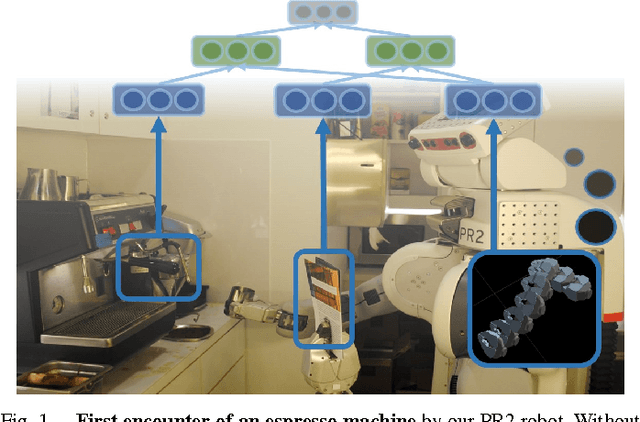
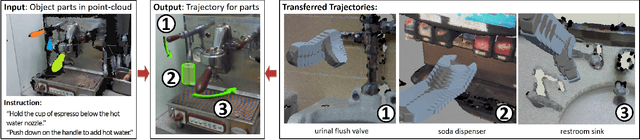
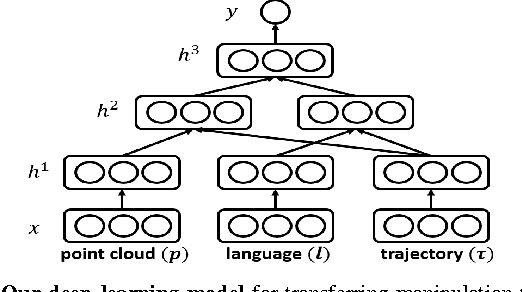
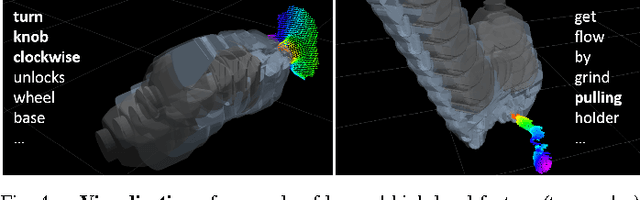
There is a large variety of objects and appliances in human environments, such as stoves, coffee dispensers, juice extractors, and so on. It is challenging for a roboticist to program a robot for each of these object types and for each of their instantiations. In this work, we present a novel approach to manipulation planning based on the idea that many household objects share similarly-operated object parts. We formulate the manipulation planning as a structured prediction problem and design a deep learning model that can handle large noise in the manipulation demonstrations and learns features from three different modalities: point-clouds, language and trajectory. In order to collect a large number of manipulation demonstrations for different objects, we developed a new crowd-sourcing platform called Robobarista. We test our model on our dataset consisting of 116 objects with 249 parts along with 250 language instructions, for which there are 1225 crowd-sourced manipulation demonstrations. We further show that our robot can even manipulate objects it has never seen before.