 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Obstacle Detection based on Unknown Objectness Scores
Paper and Code
Mar 27, 2024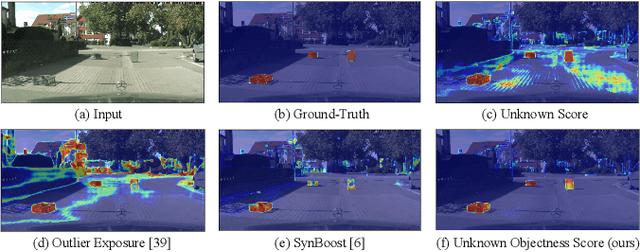
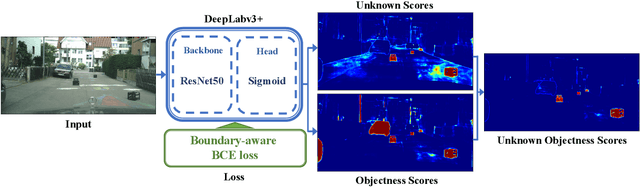
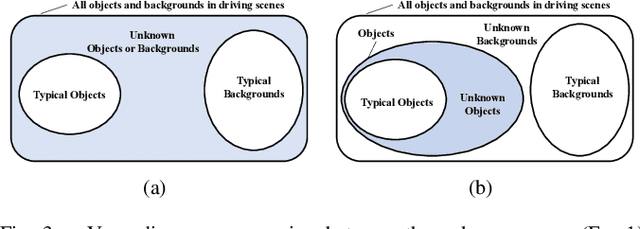
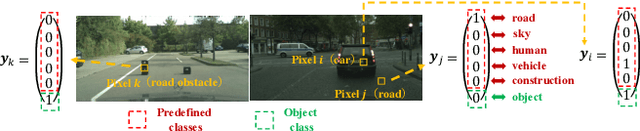
The detection of unknown traffic obstacles is vital to ensure safe autonomous driving. The standard object-detection methods cannot identify unknown objects that are not included under predefined categories. This is because object-detection methods are trained to assign a background label to pixels corresponding to the presence of unknown objects. To address this problem, the pixel-wise anomaly-detection approach has attracted increased research attention. Anomaly-detection techniques, such as uncertainty estimation and perceptual difference from reconstructed images, make it possible to identify pixels of unknown objects as out-of-distribution (OoD) samples. However, when applied to images with many unknowns and complex components, such as driving scenes, these methods often exhibit unstable performance. The purpose of this study is to achieve stable performance for detecting unknown objects by incorporating the object-detection fashions into the pixel-wise anomaly detection methods. To achieve this goal, we adopt a semantic-segmentation network with a sigmoid head that simultaneously provides pixel-wise anomaly scores and objectness scores. Our experimental results show that the objectness scores play an important role in improving the detection performance. Based on these results, we propose a novel anomaly score by integrating these two scores, which we term as unknown objectness score. Quantitative evaluations show that the proposed method outperforms state-of-the-art methods when applied to the publicly available datasets.