 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRIU-Net: Embarrassingly simple semantic segmentation of 3D LiDAR point cloud
Paper and Code
Jun 06, 2019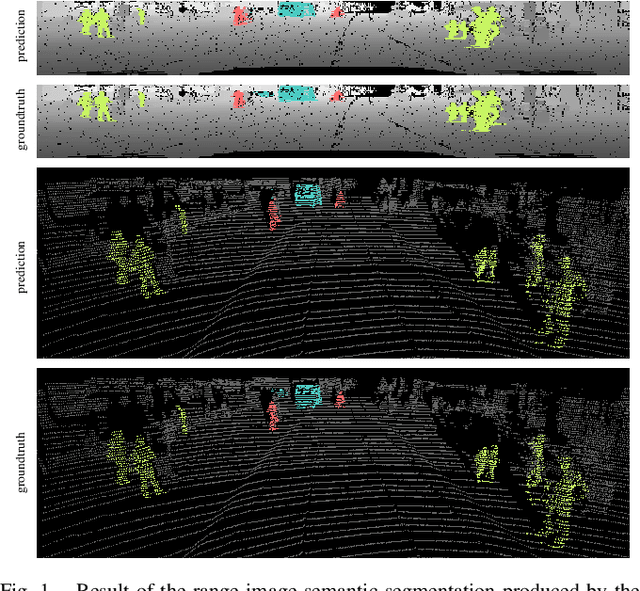
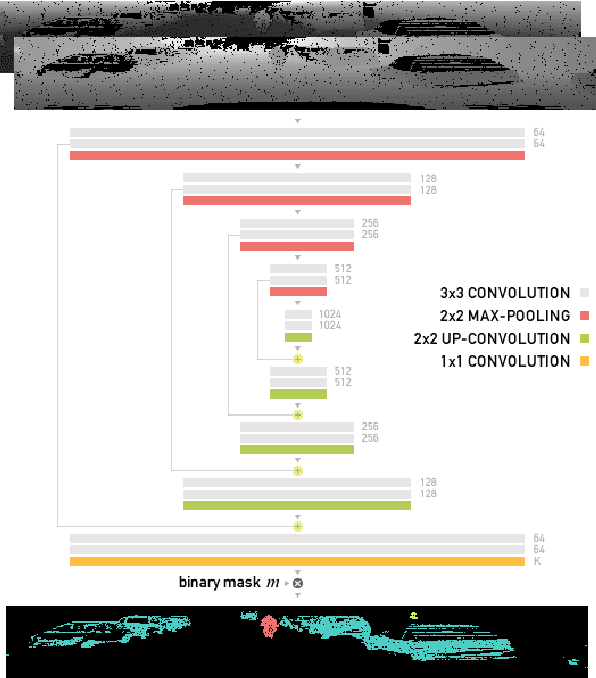
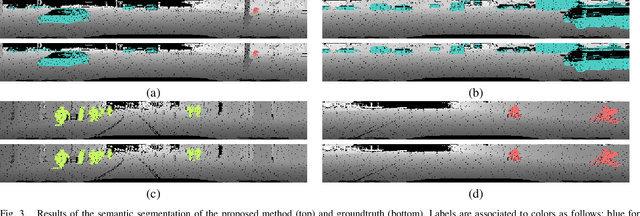
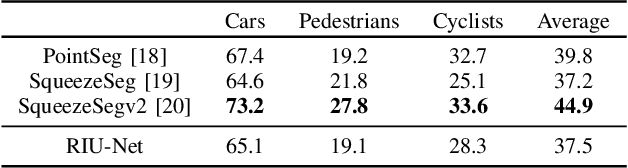
This paper proposes RIU-Net (for Range-Image U-Net), the adaptation of a popular semantic segmentation network for the semantic segmentation of a 3D LiDAR point cloud. The point cloud is turned into a 2D range-image by exploiting the topology of the sensor. This image is then used as input to a U-net. This architecture has already proved its efficiency for the task of semantic segmentation of medical images. We demonstrate how it can also be used for the accurate semantic segmentation of a 3D LiDAR point cloud and how it represents a valid bridge between image processing and 3D point cloud processing. Our model is trained on range-images built from KITTI 3D object detection dataset. Experiments show that RIU-Net, despite being very simple, offers results that are comparable to the state-of-the-art of range-image based methods. Finally, we demonstrate that this architecture is able to operate at 90fps on a single GPU, which enables deployment for real-time segmentation.