 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReverse Forward Curriculum Learning for Extreme Sample and Demonstration Efficiency in Reinforcement Learning
Paper and Code
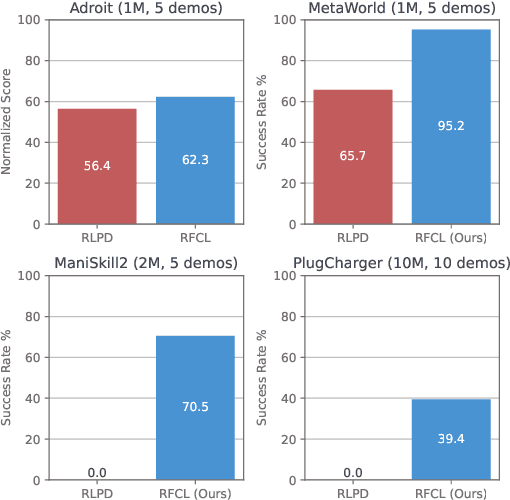
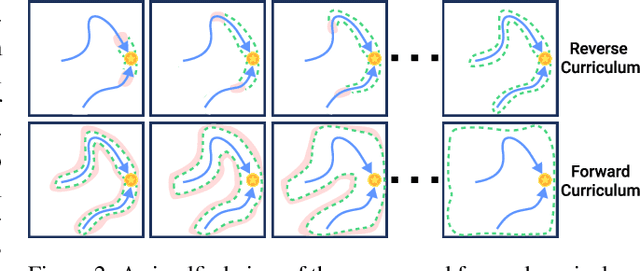
Reinforcement learning (RL) presents a promising framework to learn policies through environment interaction, but often requires an infeasible amount of interaction data to solve complex tasks from sparse rewards. One direction includes augmenting RL with offline data demonstrating desired tasks, but past work often require a lot of high-quality demonstration data that is difficult to obtain, especially for domains such as robotics. Our approach consists of a reverse curriculum followed by a forward curriculum. Unique to our approach compared to past work is the ability to efficiently leverage more than one demonstration via a per-demonstration reverse curriculum generated via state resets. The result of our reverse curriculum is an initial policy that performs well on a narrow initial state distribution and helps overcome difficult exploration problems. A forward curriculum is then used to accelerate the training of the initial policy to perform well on the full initial state distribution of the task and improve demonstration and sample efficiency. We show how the combination of a reverse curriculum and forward curriculum in our method, RFCL, enables significant improvements in demonstration and sample efficiency compared against various state-of-the-art learning-from-demonstration baselines, even solving previously unsolvable tasks that require high precision and control.