 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReuse your features: unifying retrieval and feature-metric alignment
Paper and Code
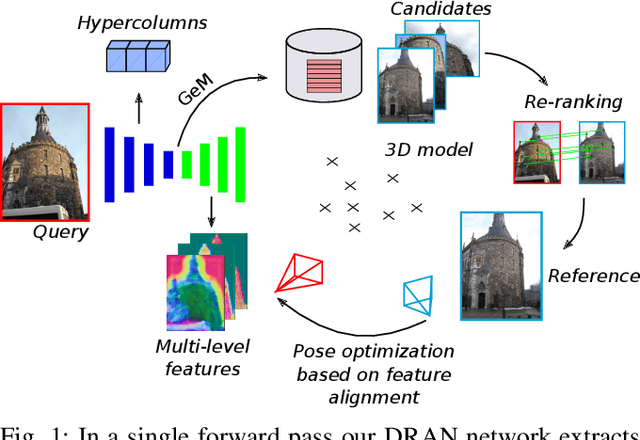
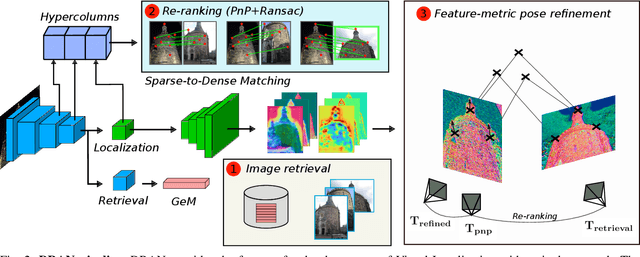
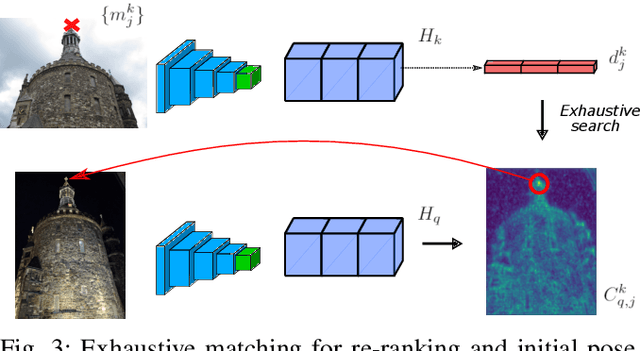
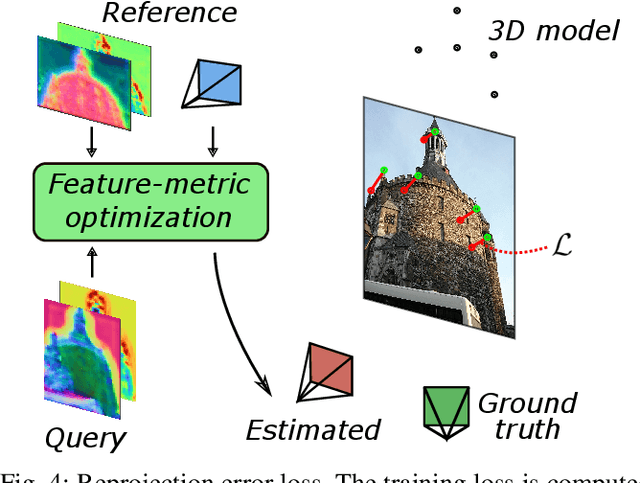
We propose a compact pipeline to unify all the steps of Visual Localization: image retrieval, candidate re-ranking and initial pose estimation, and camera pose refinement. Our key assumption is that the deep features used for these individual tasks share common characteristics, so we should reuse them in all the procedures of the pipeline. Our DRAN (Deep Retrieval and image Alignment Network) is able to extract global descriptors for efficient image retrieval, use intermediate hierarchical features to re-rank the retrieval list and produce an intial pose guess, which is finally refined by means of a feature-metric optimization based on learned deep multi-scale dense features. DRAN is the first single network able to produce the features for the three steps of visual localization. DRAN achieves a competitive performance in terms of robustness and accuracy specially in extreme day-night changes.