 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Value Function Learning for Generalization in Reinforcement Learning
Paper and Code
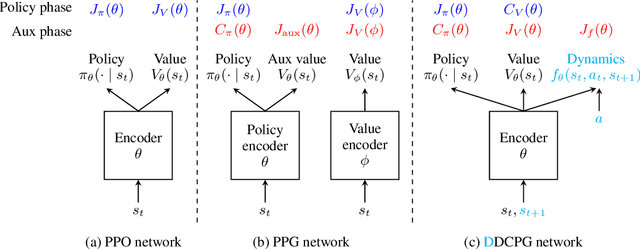
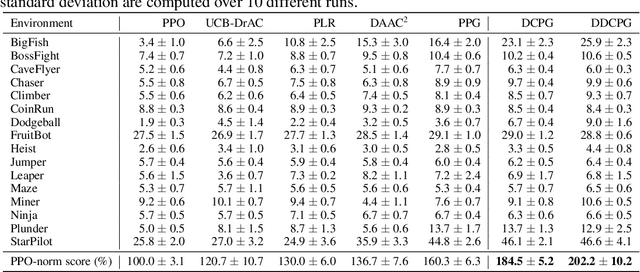

We focus on the problem of training RL agents on multiple training environments to improve observational generalization performance. In prior methods, policy and value networks are separately optimized using a disjoint network architecture to avoid interference and obtain a more accurate value function. We identify that the value network in the multiple-environment setting is more challenging to optimize and prone to overfitting training data than in the conventional single-environment setting. In addition, we find that appropriate regularization of the value network is required for better training and test performance. To this end, we propose Delayed-Critic Policy Gradient (DCPG), which implicitly penalizes the value estimates by optimizing the value network less frequently with more training data than the policy network, which can be implemented using a shared network architecture. Furthermore, we introduce a simple self-supervised task that learns the forward and inverse dynamics of environments using a single discriminator, which can be jointly optimized with the value network. Our proposed algorithms significantly improve observational generalization performance and sample efficiency in the Procgen Benchmark.