 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESSCAL3D: Resolution Scalable 3D Semantic Segmentation of Point Clouds
Paper and Code
Apr 10, 2024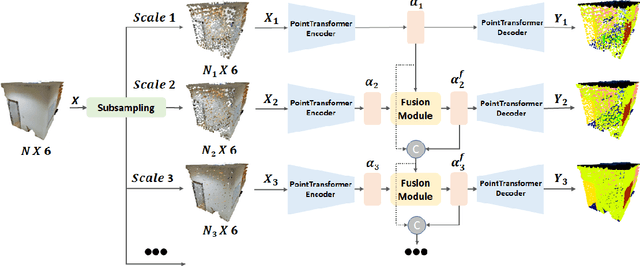
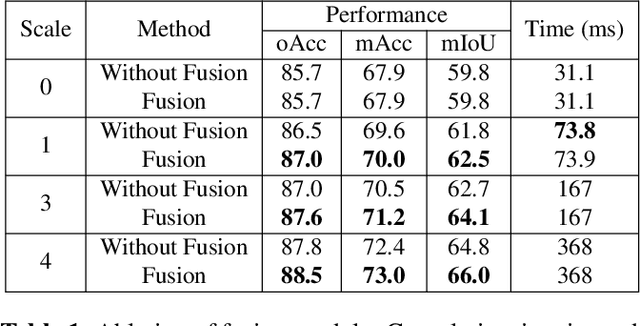

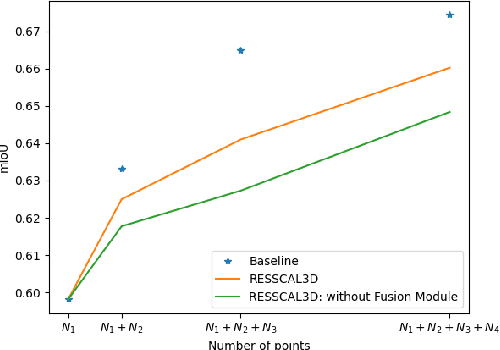
While deep learning-based methods have demonstrated outstanding results in numerous domains, some important functionalities are missing. Resolution scalability is one of them. In this work, we introduce a novel architecture, dubbed RESSCAL3D, providing resolution-scalable 3D semantic segmentation of point clouds. In contrast to existing works, the proposed method does not require the whole point cloud to be available to start inference. Once a low-resolution version of the input point cloud is available, first semantic predictions can be generated in an extremely fast manner. This enables early decision-making in subsequent processing steps. As additional points become available, these are processed in parallel. To improve performance, features from previously computed scales are employed as prior knowledge at the current scale. Our experiments show that RESSCAL3D is 31-62% faster than the non-scalable baseline while keeping a limited impact on performance. To the best of our knowledge, the proposed method is the first to propose a resolution-scalable approach for 3D semantic segmentation of point clouds based on deep learning.