 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Coverage: Exploring the Local-to-Global Trade-off
Paper and Code
Oct 03, 2019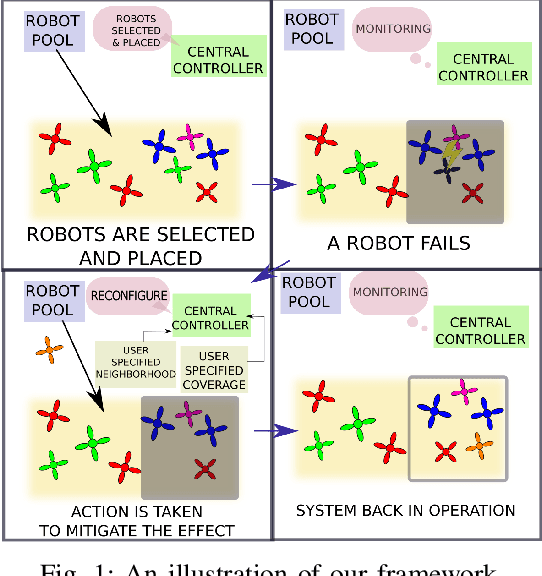
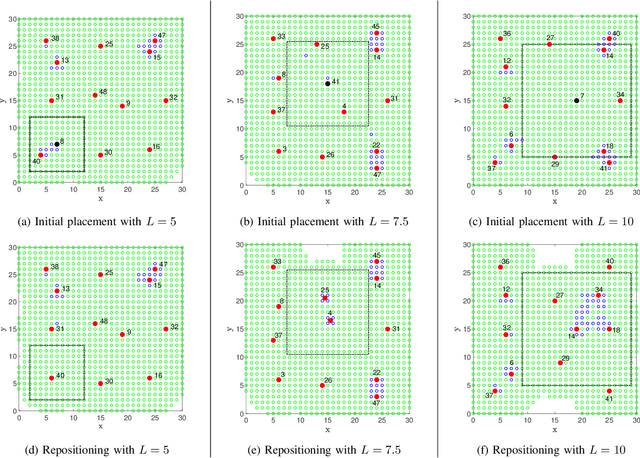
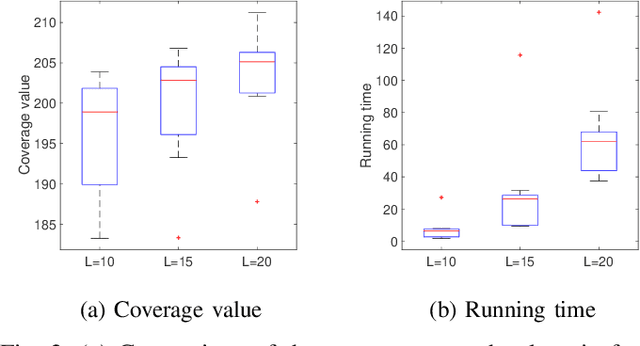
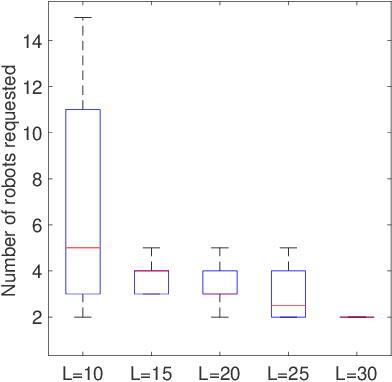
We propose a centralized control framework to select suitable robots from a heterogeneous pool and place them at appropriate locations to monitor a region for events of interest. In the event of a robot failure, the framework repositions robots in a user-defined local neighborhood of the failed robot to compensate for the coverage loss. The central controller augments the team with additional robots from the robot pool when simply repositioning robots fails to attain a user-specified level of desired coverage. The size of the local neighborhood around the failed robot and the desired coverage over the region are two settings that can be manipulated to achieve a user-specified balance. We investigate the trade-off between the coverage compensation achieved through local repositioning and the computation required to plan the new robot locations. We also study the relationship between the size of the local neighborhood and the number of additional robots added to the team for a given user-specified level of desired coverage. The computational complexity of our resilient strategy (tunable resilient coordination), is quadratic in both neighborhood size and number of robots in the team. At first glance, it seems that any desired level of coverage can be efficiently achieved by augmenting the robot team with more robots while keeping the neighborhood size fixed. However, we show that to reach a high level of coverage in a neighborhood with a large robot population, it is more efficient to enlarge the neighborhood size, instead of adding additional robots and repositioning them.