 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresentation Learning Beyond Linear Prediction Functions
Paper and Code
May 31, 2021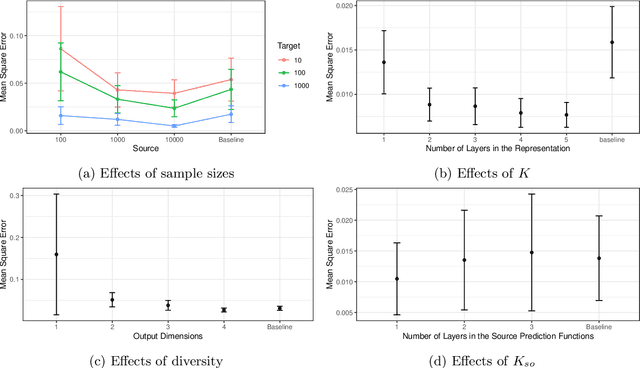
Recent papers on the theory of representation learning has shown the importance of a quantity called diversity when generalizing from a set of source tasks to a target task. Most of these papers assume that the function mapping shared representations to predictions is linear, for both source and target tasks. In practice, researchers in deep learning use different numbers of extra layers following the pretrained model based on the difficulty of the new task. This motivates us to ask whether diversity can be achieved when source tasks and the target task use different prediction function spaces beyond linear functions. We show that diversity holds even if the target task uses a neural network with multiple layers, as long as source tasks use linear functions. If source tasks use nonlinear prediction functions, we provide a negative result by showing that depth-1 neural networks with ReLu activation function need exponentially many source tasks to achieve diversity. For a general function class, we find that eluder dimension gives a lower bound on the number of tasks required for diversity. Our theoretical results imply that simpler tasks generalize better. Though our theoretical results are shown for the global minimizer of empirical risks, their qualitative predictions still hold true for gradient-based optimization algorithms as verified by our simulations on deep neural networks.