 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReport on UG^2+ Challenge Track 1: Assessing Algorithms to Improve Video Object Detection and Classification from Unconstrained Mobility Platforms
Paper and Code
Jul 26, 2019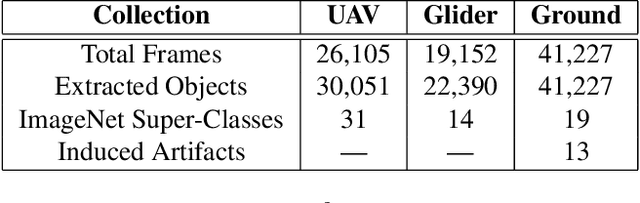
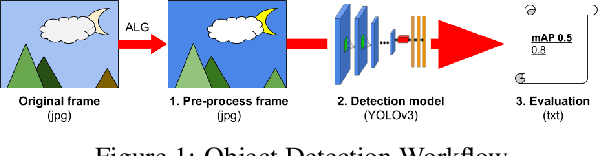


How can we effectively engineer a computer vision system that is able to interpret videos from unconstrained mobility platforms like UAVs? One promising option is to make use of image restoration and enhancement algorithms from the area of computational photography to improve the quality of the underlying frames in a way that also improves automatic visual recognition. Along these lines, exploratory work is needed to find out which image pre-processing algorithms, in combination with the strongest features and supervised machine learning approaches, are good candidates for difficult scenarios like motion blur, weather, and mis-focus --- all common artifacts in UAV acquired images. This paper summarizes the protocols and results of Track 1 of the UG^2+ Challenge held in conjunction with IEEE/CVF CVPR 2019. The challenge looked at two separate problems: (1) object detection improvement in video, and (2) object classification improvement in video. The challenge made use of the UG^2 (UAV, Glider, Ground) dataset, which is an established benchmark for assessing the interplay between image restoration and enhancement and visual recognition. 16 algorithms were submitted by academic and corporate teams, and a detailed analysis of how they performed on each challenge problem is reported here.