 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReMIX: Regret Minimization for Monotonic Value Function Factorization in Multiagent Reinforcement Learning
Paper and Code
Feb 11, 2023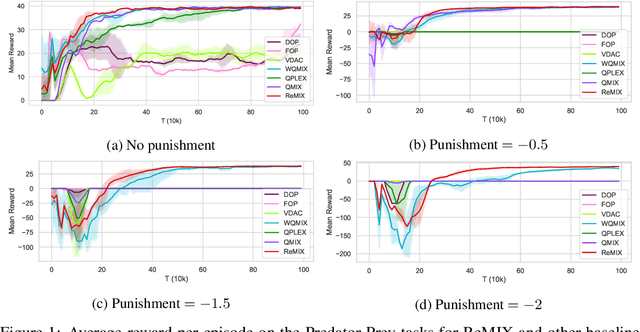
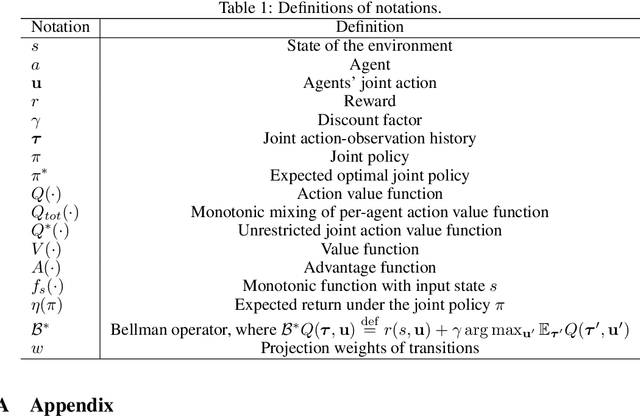
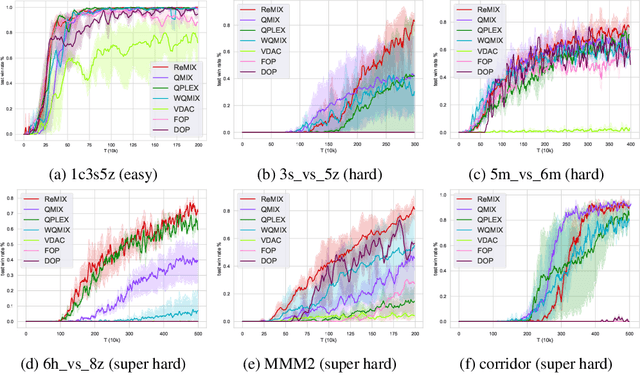
Value function factorization methods have become a dominant approach for cooperative multiagent reinforcement learning under a centralized training and decentralized execution paradigm. By factorizing the optimal joint action-value function using a monotonic mixing function of agents' utilities, these algorithms ensure the consistency between joint and local action selections for decentralized decision-making. Nevertheless, the use of monotonic mixing functions also induces representational limitations. Finding the optimal projection of an unrestricted mixing function onto monotonic function classes is still an open problem. To this end, we propose ReMIX, formulating this optimal projection problem for value function factorization as a regret minimization over the projection weights of different state-action values. Such an optimization problem can be relaxed and solved using the Lagrangian multiplier method to obtain the close-form optimal projection weights. By minimizing the resulting policy regret, we can narrow the gap between the optimal and the restricted monotonic mixing functions, thus obtaining an improved monotonic value function factorization. Our experimental results on Predator-Prey and StarCraft Multiagent Challenge environments demonstrate the effectiveness of our method, indicating the better capabilities of handling environments with non-monotonic value functions.