 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReliable Attribute-Based Object Recognition Using High Predictive Value Classifiers
Paper and Code
Oct 24, 2016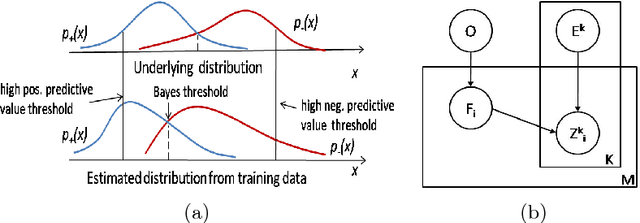
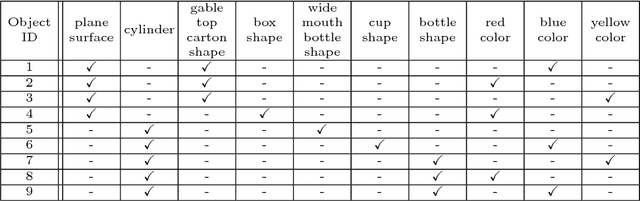
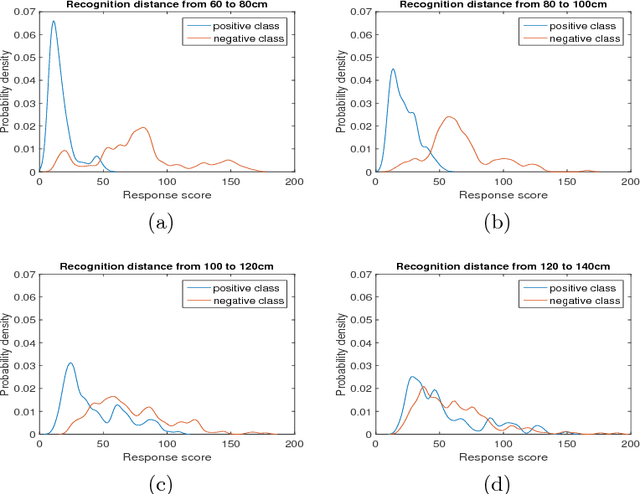
We consider the problem of object recognition in 3D using an ensemble of attribute-based classifiers. We propose two new concepts to improve classification in practical situations, and show their implementation in an approach implemented for recognition from point-cloud data. First, the viewing conditions can have a strong influence on classification performance. We study the impact of the distance between the camera and the object and propose an approach to fuse multiple attribute classifiers, which incorporates distance into the decision making. Second, lack of representative training samples often makes it difficult to learn the optimal threshold value for best positive and negative detection rate. We address this issue, by setting in our attribute classifiers instead of just one threshold value, two threshold values to distinguish a positive, a negative and an uncertainty class, and we prove the theoretical correctness of this approach. Empirical studies demonstrate the effectiveness and feasibility of the proposed concepts.