 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative planar motion for vehicle-mounted cameras from a single affine correspondence
Paper and Code
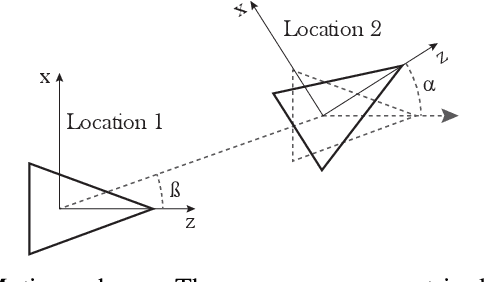
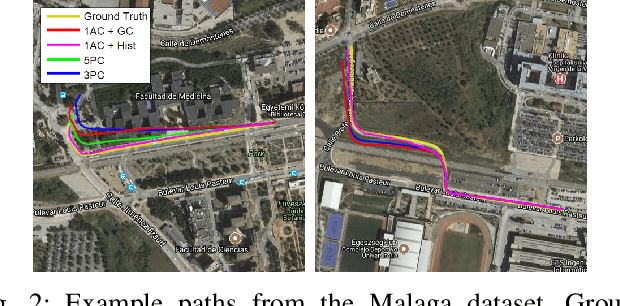
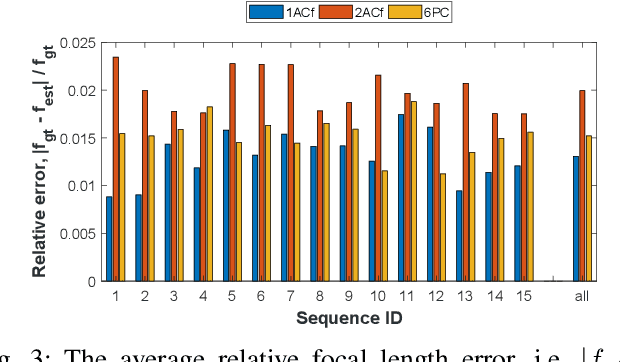
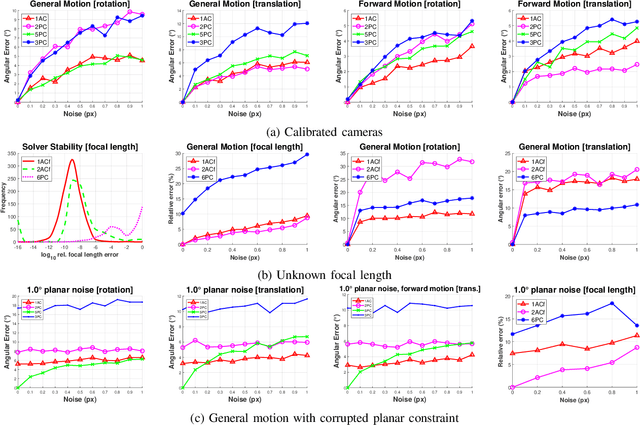
Two solvers are proposed for estimating the extrinsic camera parameters from a single affine correspondence assuming general planar motion. In this case, the camera movement is constrained to a plane and the image plane is orthogonal to the ground. The algorithms do not assume other constraints, e.g.\ the non-holonomic one, to hold. A new minimal solver is proposed for the semi-calibrated case, i.e. the camera parameters are known except a common focal length. Another method is proposed for the fully calibrated case. Due to requiring a single correspondence, robust estimation, e.g. histogram voting, leads to a fast and accurate procedure. The proposed methods are tested in our synthetic environment and on publicly available real datasets consisting of videos through tens of kilometres. They are superior to the state-of-the-art both in terms of accuracy and processing time.