Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Linear Function Approximation and LQ control Converges
Paper and Code
Mar 09, 2007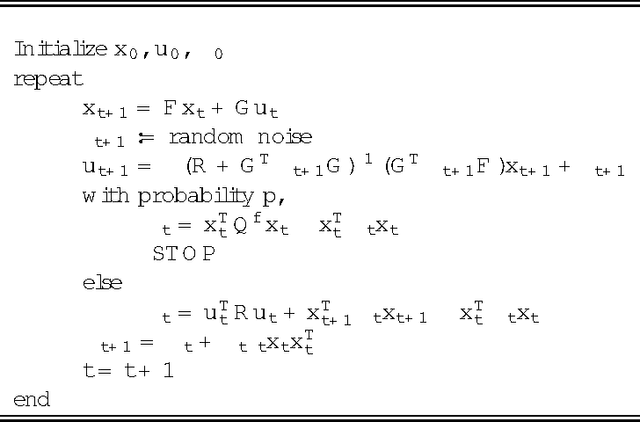
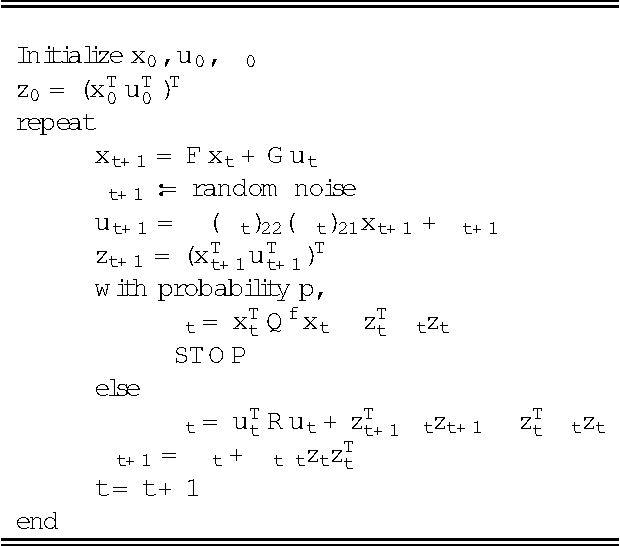
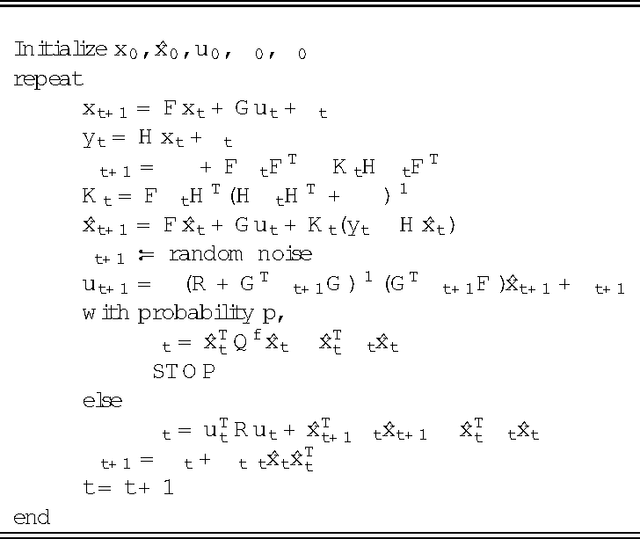
Reinforcement learning is commonly used with function approximation. However, very few positive results are known about the convergence of function approximation based RL control algorithms. In this paper we show that TD(0) and Sarsa(0) with linear function approximation is convergent for a simple class of problems, where the system is linear and the costs are quadratic (the LQ control problem). Furthermore, we show that for systems with Gaussian noise and non-completely observable states (the LQG problem), the mentioned RL algorithms are still convergent, if they are combined with Kalman filtering.
* 9 pages
View paper on