 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Picking Cluttered General Objects with Dense Object Descriptors
Paper and Code
Apr 20, 2023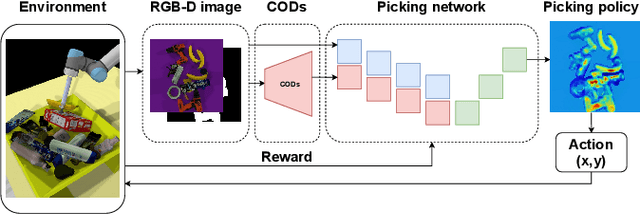
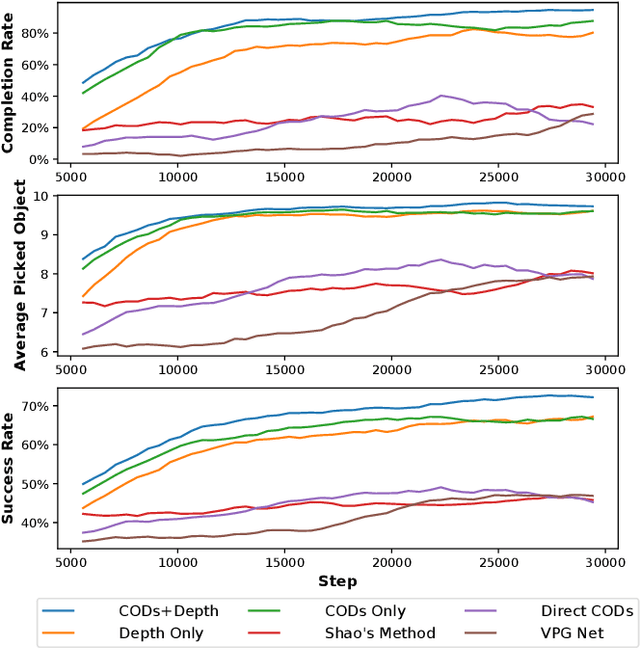
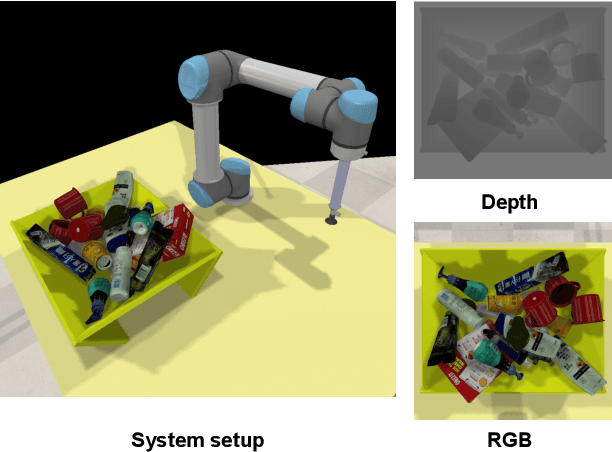
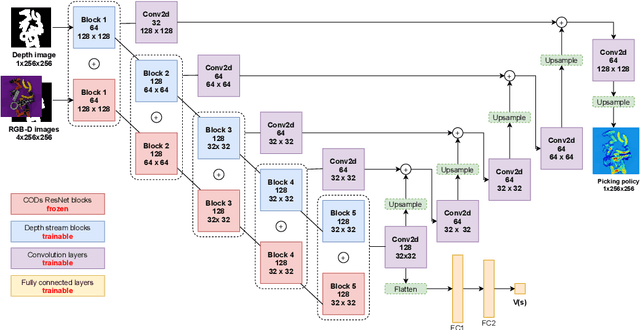
Picking cluttered general objects is a challenging task due to the complex geometries and various stacking configurations. Many prior works utilize pose estimation for picking, but pose estimation is difficult on cluttered objects. In this paper, we propose Cluttered Objects Descriptors (CODs), a dense cluttered objects descriptor that can represent rich object structures, and use the pre-trained CODs network along with its intermediate outputs to train a picking policy. Additionally, we train the policy with reinforcement learning, which enable the policy to learn picking without supervision. We conduct experiments to demonstrate that our CODs is able to consistently represent seen and unseen cluttered objects, which allowed for the picking policy to robustly pick cluttered general objects. The resulting policy can pick 96.69% of unseen objects in our experimental environment which is twice as cluttered as the training scenarios.