 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegularizing Model-Based Planning with Energy-Based Models
Paper and Code
Oct 12, 2019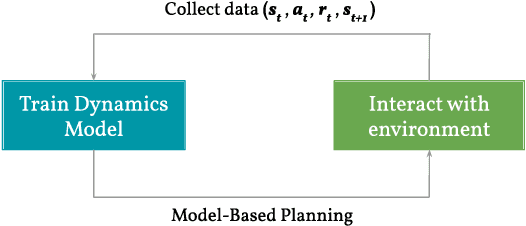
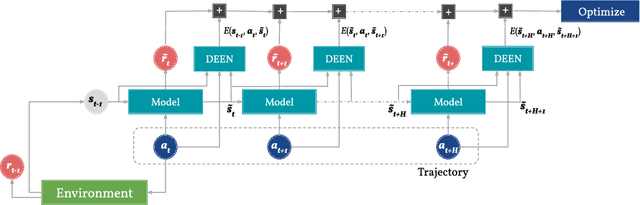
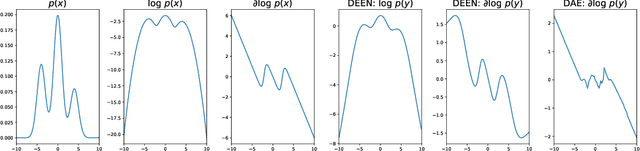
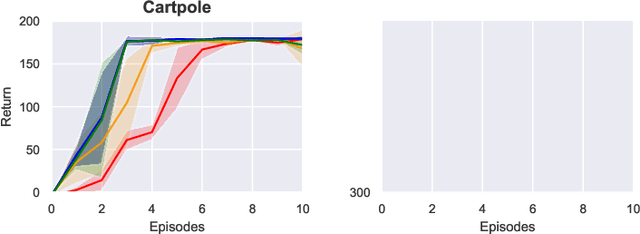
Model-based reinforcement learning could enable sample-efficient learning by quickly acquiring rich knowledge about the world and using it to improve behaviour without additional data. Learned dynamics models can be directly used for planning actions but this has been challenging because of inaccuracies in the learned models. In this paper, we focus on planning with learned dynamics models and propose to regularize it using energy estimates of state transitions in the environment. We visually demonstrate the effectiveness of the proposed method and show that off-policy training of an energy estimator can be effectively used to regularize planning with pre-trained dynamics models. Further, we demonstrate that the proposed method enables sample-efficient learning to achieve competitive performance in challenging continuous control tasks such as Half-cheetah and Ant in just a few minutes of experience.