 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegret-Optimal Filtering
Paper and Code
Jan 25, 2021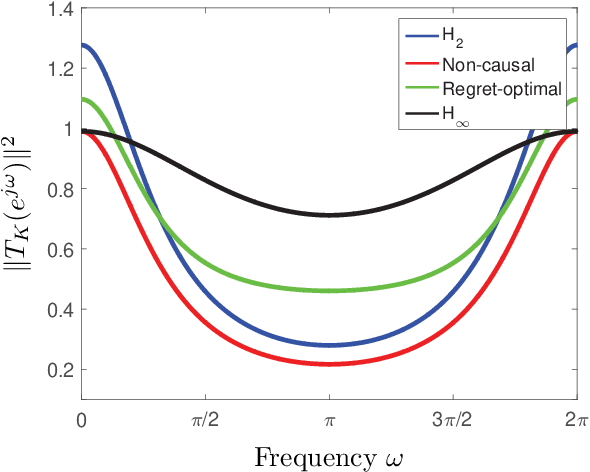
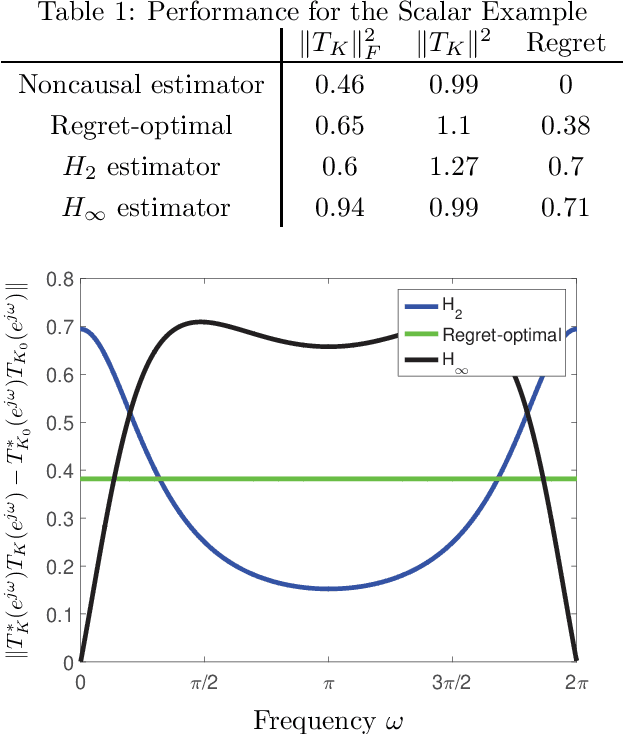

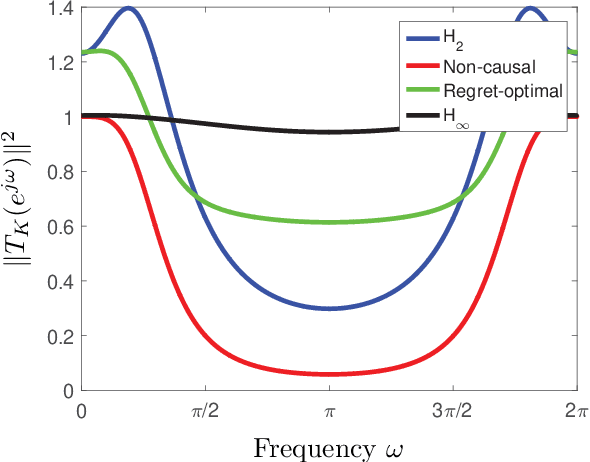
We consider the problem of filtering in linear state-space models (e.g., the Kalman filter setting) through the lens of regret optimization. Different assumptions on the driving disturbance and the observation noise sequences give rise to different estimators: in the stochastic setting to the celebrated Kalman filter, and in the deterministic setting of bounded energy disturbances to $H_\infty$ estimators. In this work, we formulate a novel criterion for filter design based on the concept of regret between the estimation error energy of a clairvoyant estimator that has access to all future observations (a so-called smoother) and a causal one that only has access to current and past observations. The regret-optimal estimator is chosen to minimize this worst-case difference across all bounded-energy noise sequences. The resulting estimator is adaptive in the sense that it aims to mimic the behavior of the clairvoyant estimator, irrespective of what the realization of the noise will be and thus interpolates between the stochastic and deterministic approaches. We provide a solution for the regret estimation problem at two different levels. First, we provide a solution at the operator level by reducing it to the Nehari problem. Second, for state-space models, we explicitly find the estimator that achieves the optimal regret. From a computational perspective, the regret-optimal estimator can be easily implemented by solving three Riccati equations and a single Lyapunov equation. For a state-space model of dimension $n$, the regret-optimal estimator has a state-space structure of dimension $3n$. We demonstrate the applicability and efficacy of the estimator in a variety of problems and observe that the estimator has average and worst-case performances that are simultaneously close to their optimal values. We therefore argue that regret-optimality is a viable approach to estimator design.