 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegret Bounds for Decentralized Learning in Cooperative Multi-Agent Dynamical Systems
Paper and Code
Jan 27, 2020
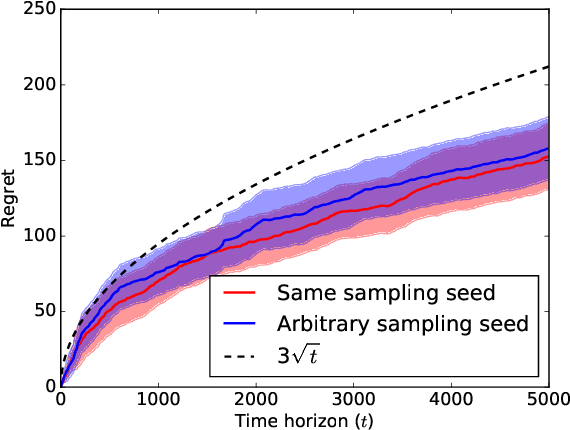
Regret analysis is challenging in Multi-Agent Reinforcement Learning (MARL) primarily due to the dynamical environments and the decentralized information among agents. We attempt to solve this challenge in the context of decentralized learning in multi-agent linear-quadratic (LQ) dynamical systems. We begin with a simple setup consisting of two agents and two dynamically decoupled stochastic linear systems, each system controlled by an agent. The systems are coupled through a quadratic cost function. When both systems' dynamics are unknown and there is no communication among the agents, we show that no learning policy can generate sub-linear in $T$ regret, where $T$ is the time horizon. When only one system's dynamics are unknown and there is one-directional communication from the agent controlling the unknown system to the other agent, we propose a MARL algorithm based on the construction of an auxiliary single-agent LQ problem. The auxiliary single-agent problem in the proposed MARL algorithm serves as an implicit coordination mechanism among the two learning agents. This allows the agents to achieve a regret within $O(\sqrt{T})$ of the regret of the auxiliary single-agent problem. Consequently, using existing results for single-agent LQ regret, our algorithm provides a $\tilde{O}(\sqrt{T})$ regret bound. (Here $\tilde{O}(\cdot)$ hides constants and logarithmic factors). Our numerical experiments indicate that this bound is matched in practice. From the two-agent problem, we extend our results to multi-agent LQ systems with certain communication patterns.