 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegHEC: Hand-Eye Calibration via Simultaneous Multi-view Point Clouds Registration of Arbitrary Object
Paper and Code
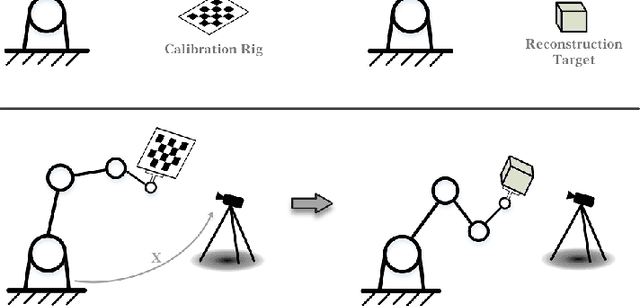



RegHEC is a registration-based hand-eye calibration technique with no need for accurate calibration rig but arbitrary available objects, applicable for both eye-in-hand and eye-to-hand cases. It tries to find the hand-eye relation which brings multi-view point clouds of arbitrary scene into simultaneous registration under a common reference frame. RegHEC first achieves initial alignment of multi-view point clouds via Bayesian optimization, where registration problem is modeled as a Gaussian process over hand-eye relation and the covariance function is modified to be compatible with distance metric in 3-D motion space SE(3), then passes the initial guess of hand-eye relation to an Anderson Accelerated ICP variant for later fine registration and accurate calibration. RegHEC has little requirement on calibration object, it is applicable with sphere, cone, cylinder and even simple plane, which can be quite challenging for correct point cloud registration and sensor motion estimation using existing methods. While suitable for most 3-D vision guided tasks, RegHEC is especially favorable for robotic 3-D reconstruction, as calibration and multi-view point clouds registration of reconstruction target are unified into a single process. Our technique is verified with extensive experiments using varieties of arbitrary objects and real hand-eye system. We release an open-source C++ implementation of RegHEC.