Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRedatuming physical systems using symmetric autoencoders
Paper and Code
Aug 05, 2021
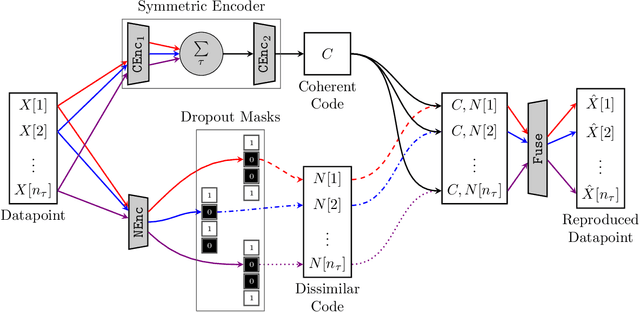


This paper considers physical systems described by hidden states and indirectly observed through repeated measurements corrupted by unmodeled nuisance parameters. A network-based representation learns to disentangle the coherent information (relative to the state) from the incoherent nuisance information (relative to the sensing). Instead of physical models, the representation uses symmetry and stochastic regularization to inform an autoencoder architecture called SymAE. It enables redatuming, i.e., creating virtual data instances where the nuisances are uniformized across measurements.
View paper on