 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoning with Scene Graphs for Robot Planning under Partial Observability
Paper and Code
Feb 21, 2022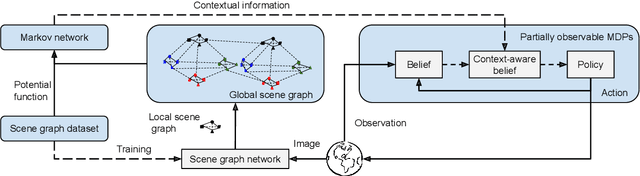
Robot planning in partially observable domains is difficult, because a robot needs to estimate the current state and plan actions at the same time. When the domain includes many objects, reasoning about the objects and their relationships makes robot planning even more difficult. In this paper, we develop an algorithm called scene analysis for robot planning (SARP) that enables robots to reason with visual contextual information toward achieving long-term goals under uncertainty. SARP constructs scene graphs, a factored representation of objects and their relations, using images captured from different positions, and reasons with them to enable context-aware robot planning under partial observability. Experiments have been conducted using multiple 3D environments in simulation, and a dataset collected by a real robot. In comparison to standard robot planning and scene analysis methods, in a target search domain, SARP improves both efficiency and accuracy in task completion. Supplementary material can be found at https://tinyurl.com/sarp22