 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRealtime CNN-based Keypoint Detector with Sobel Filter and CNN-based Descriptor Trained with Keypoint Candidates
Paper and Code
Nov 04, 2020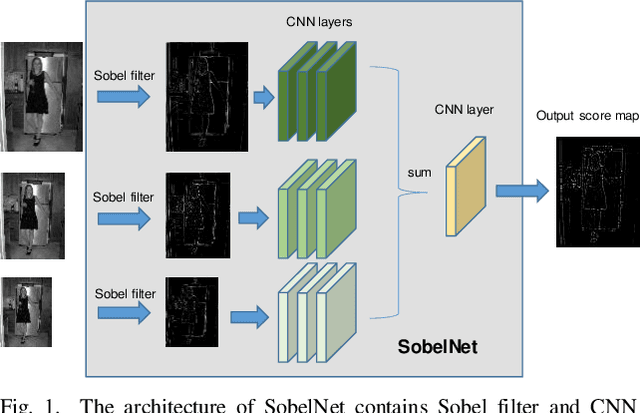
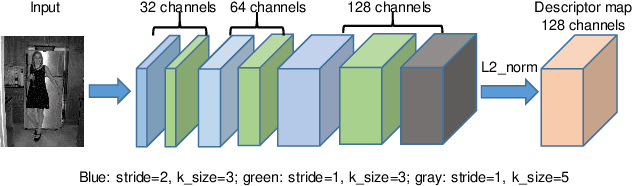
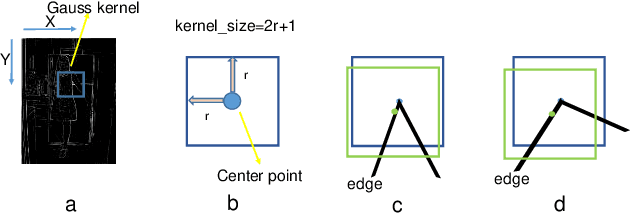
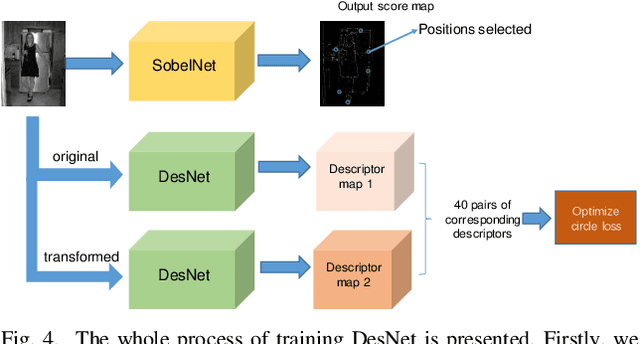
The local feature detector and descriptor are essential in many computer vision tasks, such as SLAM and 3D reconstruction. In this paper, we introduce two separate CNNs, lightweight SobelNet and DesNet, to detect key points and to compute dense local descriptors. The detector and the descriptor work in parallel. Sobel filter provides the edge structure of the input images as the input of CNN. The locations of key points will be obtained after exerting the non-maximum suppression (NMS) process on the output map of the CNN. We design Gaussian loss for the training process of SobelNet to detect corner points as keypoints. At the same time, the input of DesNet is the original grayscale image, and circle loss is used to train DesNet. Besides, output maps of SobelNet are needed while training DesNet. We have evaluated our method on several benchmarks including HPatches benchmark, ETH benchmark, and FM-Bench. SobelNet achieves better or comparable performance with less computation compared with SOTA methods in recent years. The inference time of an image of 640x480 is 7.59ms and 1.09ms for SobelNet and DesNet respectively on RTX 2070 SUPER.