 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time tree search with pessimistic scenarios
Paper and Code
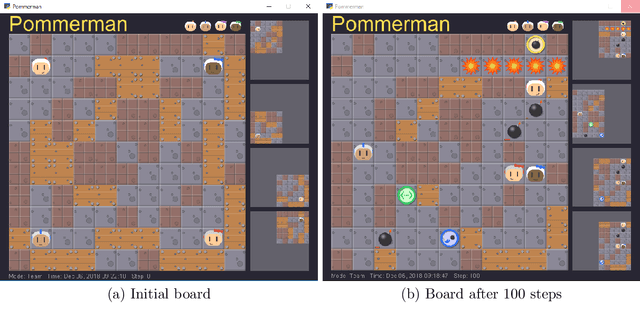

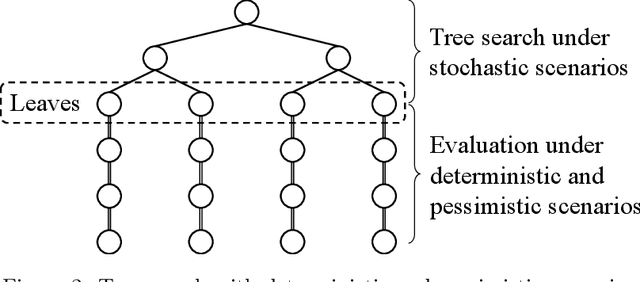

Autonomous agents need to make decisions in a sequential manner, under partially observable environment, and in consideration of how other agents behave. In critical situations, such decisions need to be made in real time for example to avoid collisions and recover to safe conditions. We propose a technique of tree search where a deterministic and pessimistic scenario is used after a specified depth. Because there is no branching with the deterministic scenario, the proposed technique allows us to take into account far ahead in the future in real time. The effectiveness of the proposed technique is demonstrated in Pommerman, a multi-agent environment used in a NeurIPS 2018 competition, where the agents that implement the proposed technique have won the first and third places.