 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Numerical Differentiation of Sampled Data Using Adaptive Input and State Estimation
Paper and Code
Aug 16, 2023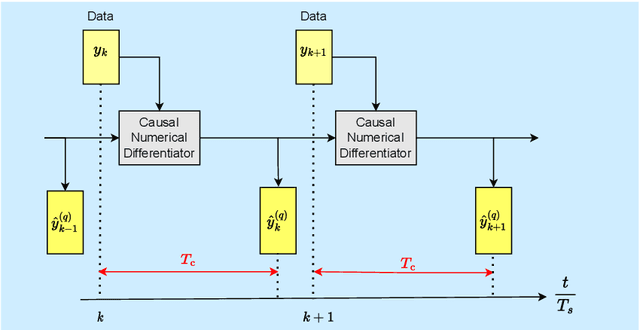
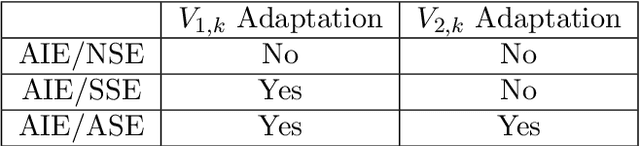
Real-time numerical differentiation plays a crucial role in many digital control algorithms, such as PID control, which requires numerical differentiation to implement derivative action. This paper addresses the problem of numerical differentiation for real-time implementation with minimal prior information about the signal and noise using adaptive input and state estimation. Adaptive input estimation with adaptive state estimation (AIE/ASE) is based on retrospective cost input estimation, while adaptive state estimation is based on an adaptive Kalman filter in which the input-estimation error covariance and the measurement-noise covariance are updated online. The accuracy of AIE/ASE is compared numerically to several conventional numerical differentiation methods. Finally, AIE/ASE is applied to simulated vehicle position data generated from CarSim.