 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Multi-Diver Tracking and Re-identification for Underwater Human-Robot Collaboration
Paper and Code
Oct 21, 2019

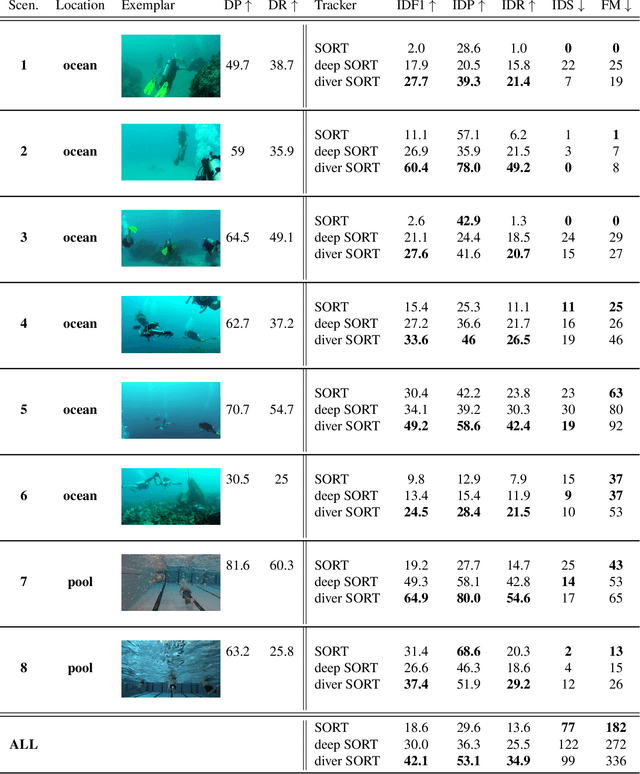

Autonomous underwater robots working with teams of human divers may need to distinguish between different divers, e.g. to recognize a lead diver or to follow a specific team member. This paper describes a technique that enables autonomous underwater robots to track divers in real time as well as to reidentify them. The approach is an extension of Simple Online Realtime Tracking (SORT) with an appearance metric (deep SORT). Initial diver detection is performed with a custom CNN designed for realtime diver detection, and appearance features are subsequently extracted for each detected diver. Next, realtime tracking-by-detection is performed with an extension of the deep SORT algorithm. We evaluate this technique on a series of videos of divers performing human-robot collaborative tasks and show that our methods result in more divers being accurately identified during tracking. We also discuss the practical considerations of applying multi-person tracking to on-board autonomous robot operations, and we consider how failure cases can be addressed during on-board tracking.