 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Ground-Plane Refined LiDAR SLAM
Paper and Code
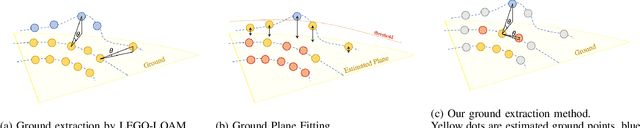
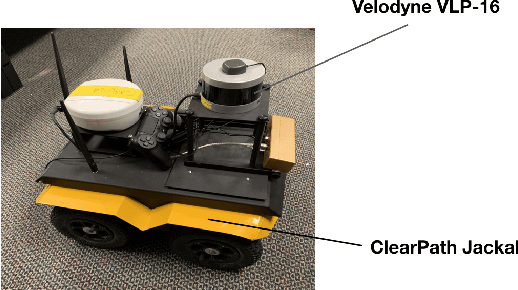
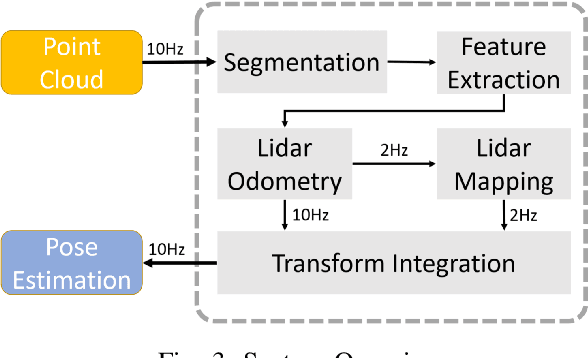
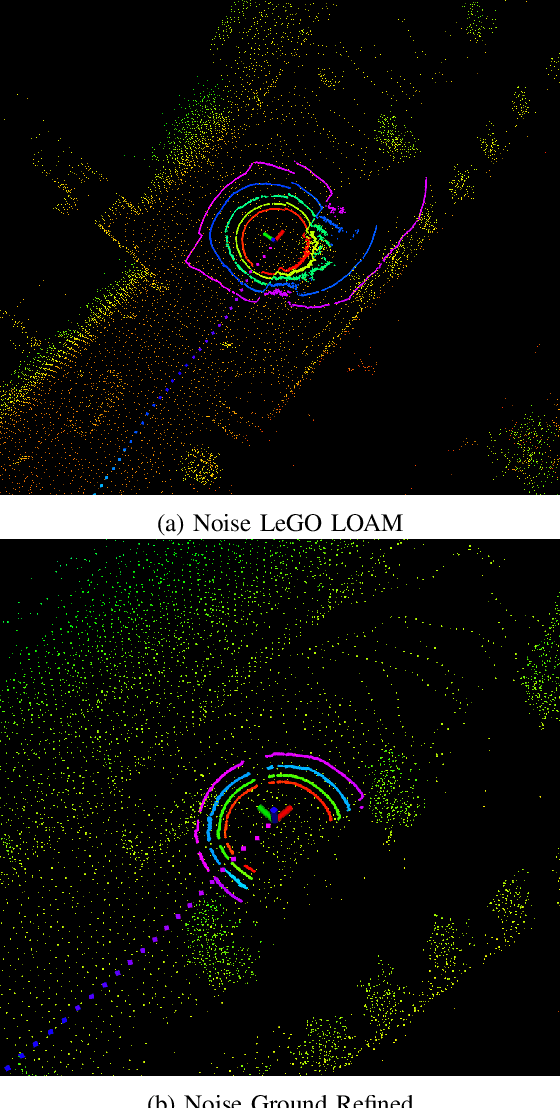
SLAM system using only point cloud has been proven successful in recent years. In most of these systems, they extract features for tracking after ground removal, which causes large variance on the z-axis. Ground actually provides robust information to obtain [t_z, \theta_{roll}, \theta_{pitch}]$. In this project, we followed the LeGO-LOAM, a light-weighted real-time SLAM system that extracts and registers ground as an addition to the original LOAM, and we proposed a new clustering-based method to refine the planar extraction algorithm for ground such that the system can handle much more noisy or dynamic environments. We implemented this method and compared it with LeGo-LOAM on our collected data of CMU campus, as well as a collected dataset for ATV (All-Terrain Vehicle) for off-road self-driving. Both visualization and evaluation results show obvious improvement of our algorithm.