 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time force control of an SEA-based body weight support unit with the 2-DOF control structure
Paper and Code
Sep 11, 2018
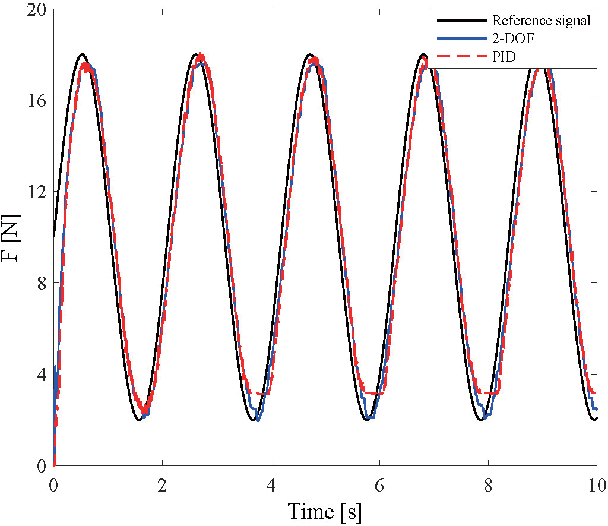

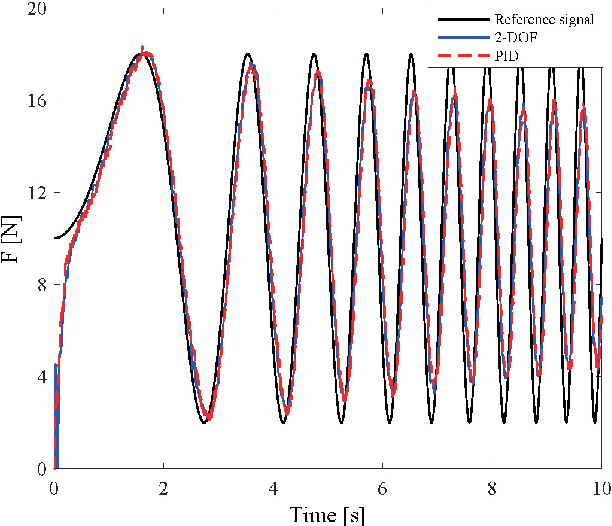
Body weight support (BWS) is a fundamental technique in rehabilitation. Along with the dramatic progressing of rehabilitation science and engineering, BWS is quickly evolving with new initiatives and has attracted deep research effort in recent years. We have built up a novel gravity offloading system, in which the patient is allowed to move freely in the three-dimensional Cartesian space and receives support against gravity. Thus, the patients, especially for those that suffer from neurological injury such as stroke or spinal cord injury, can focus their residual motor control capabilities on essential therapeutic trainings of balance and gait. The real-time force control performance is critical for the BWS unit to provide suitable support and avoid disturbance. In this work, we have re-designed our BWS unit with a series elastic actuation structure to improve the human-robot interaction performance. Further, the 2 degrees of freedom (2-DOF) control approach was taken for accurate and robust BWS force control. Both simulation and experimental results have validated the efficacy of the BWS design and real-time control methods.