 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Ellipse Detection for Robotics Applications
Paper and Code
Feb 25, 2021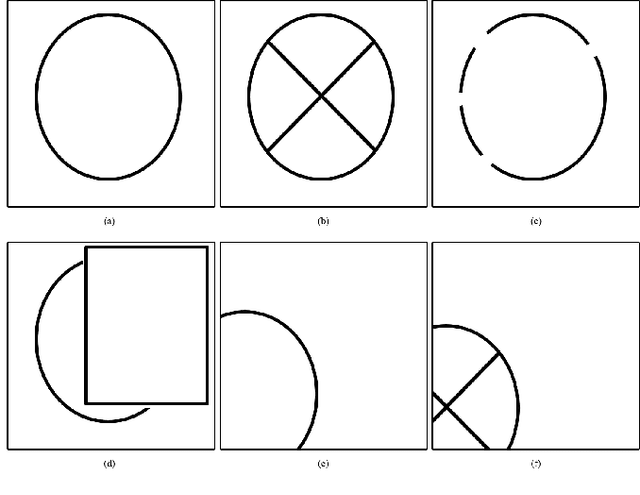
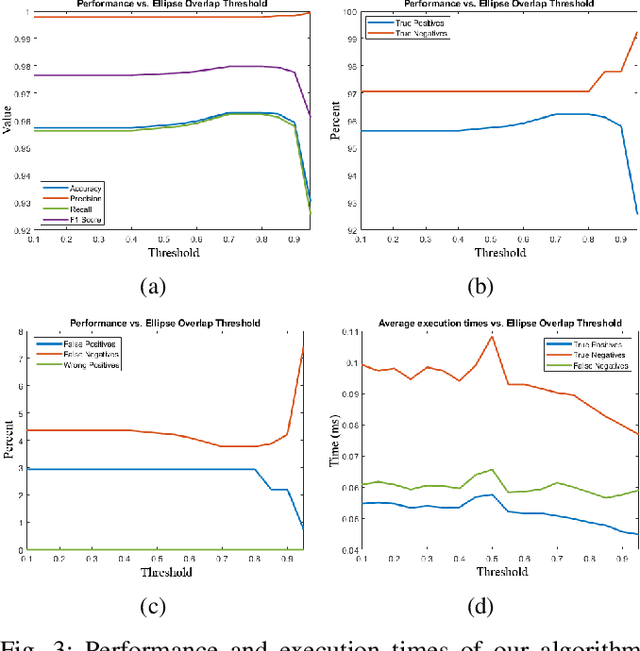
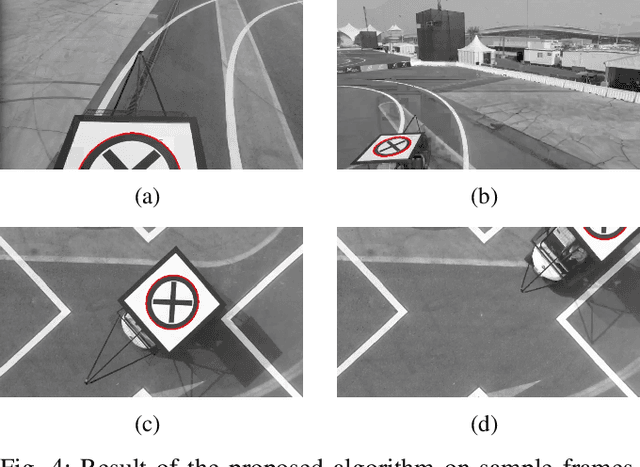
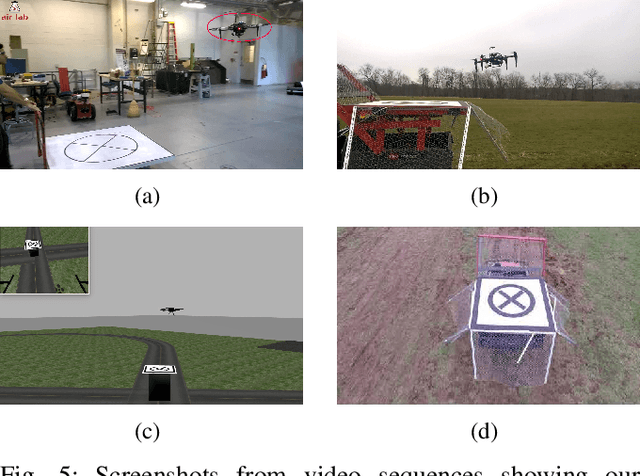
We propose a new algorithm for real-time detection and tracking of elliptic patterns suitable for real-world robotics applications. The method fits ellipses to each contour in the image frame and rejects ellipses that do not yield a good fit. It can detect complete, partial, and imperfect ellipses in extreme weather and lighting conditions and is lightweight enough to be used on robots' resource-limited onboard computers. The method is used on an example application of autonomous UAV landing on a fast-moving vehicle to show its performance indoors, outdoors, and in simulation on a real-world robotics task. The comparison with other well-known ellipse detection methods shows that our proposed algorithm outperforms other methods with the F1 score of 0.981 on a dataset with over 1500 frames. The videos of experiments, the source codes, and the collected dataset are provided with the paper.