Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time 3D Object Detection using Feature Map Flow
Paper and Code
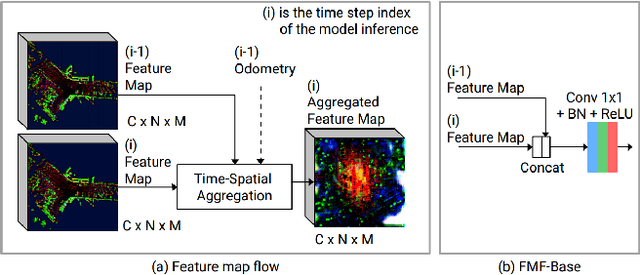



In this paper, we present a real-time 3D detection approach considering time-spatial feature map aggregation from different time steps of deep neural model inference (named feature map flow, FMF). Proposed approach improves the quality of 3D detection center-based baseline and provides real-time performance on the nuScenes and Waymo benchmark. Code is available at https://github.com/YoushaaMurhij/FMFNet
* CVPR 2021 Workshop on autonomous driving (Waymo Real-time 3D
Detection)
View paper on