 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Robot Deep Reinforcement Learning: Improving Trajectory Tracking of Flexible-Joint Manipulator with Reference Correction
Paper and Code
Mar 14, 2022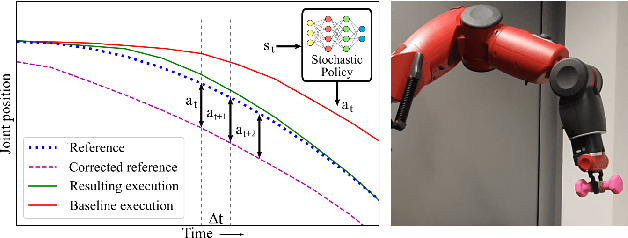
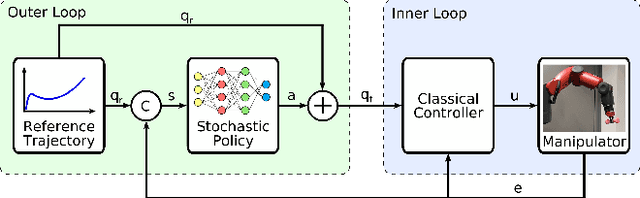
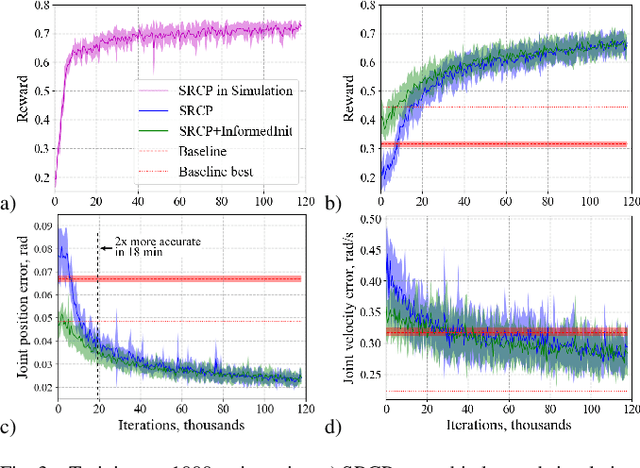
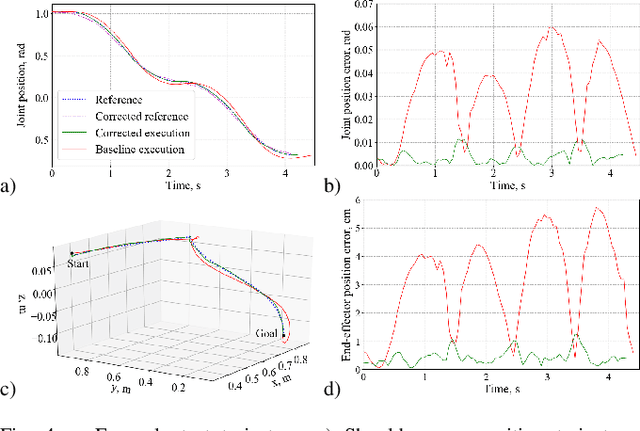
Flexible-joint manipulators are governed by complex nonlinear dynamics, defining a challenging control problem. In this work, we propose an approach to learn an outer-loop joint trajectory tracking controller with deep reinforcement learning. The controller represented by a stochastic policy is learned in under two hours directly on the real robot. This is achieved through bounded reference correction actions and use of a model-free off-policy learning method. In addition, an informed policy initialization is proposed, where the agent is pre-trained in a learned simulation. We test our approach on the 7 DOF manipulator of a Baxter robot. We demonstrate that the proposed method is capable of consistent learning across multiple runs when applied directly on the real robot. Our method yields a policy which significantly improves the trajectory tracking accuracy in comparison to the vendor-provided controller, generalizing to an unseen payload.