 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal Robot Challenge 2021: Cartesian Position Control with Triangle Grasp and Trajectory Interpolation
Paper and Code
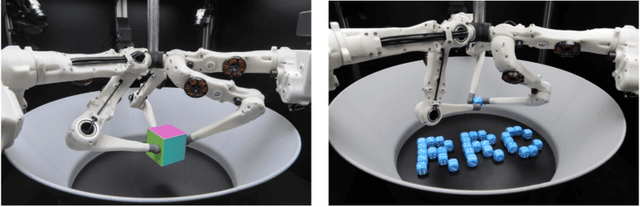
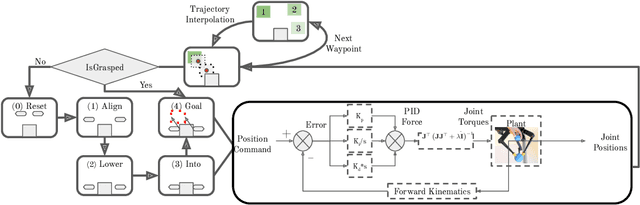
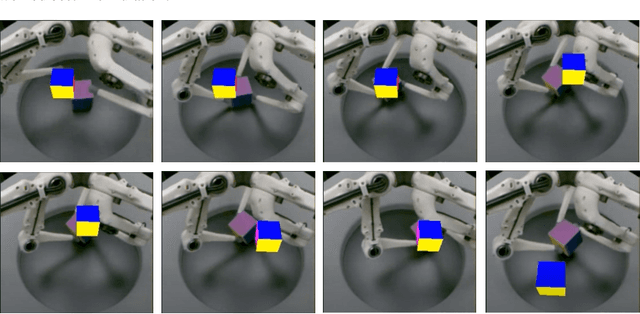
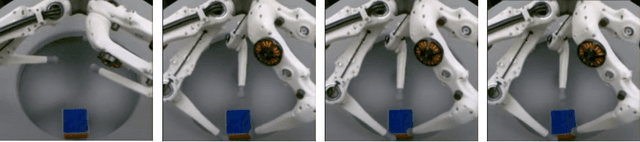
We present our runner-up approach for the Real Robot Challenge 2021. We build upon our previous approach used in Real Robot Challenge 2020. To solve the task of sequential goal-reaching we focus on two aspects to achieving near-optimal trajectory: Grasp stability and Controller performance. In the RRC 2021 simulated challenge, our method relied on a hand-designed Pinch grasp combined with Trajectory Interpolation for better stability during the motion for fast goal-reaching. In Stage 1, we observe reverting to a Triangular grasp to provide a more stable grasp when combined with Trajectory Interpolation, possibly due to the sim2real gap. The video demonstration for our approach is available at https://youtu.be/dlOueoaRWrM. The code is publicly available at https://github.com/madan96/benchmark-rrc.