 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Temporal Logic Planning for Multiple Robots in Unknown Occupancy Grid Maps
Paper and Code
Dec 14, 2020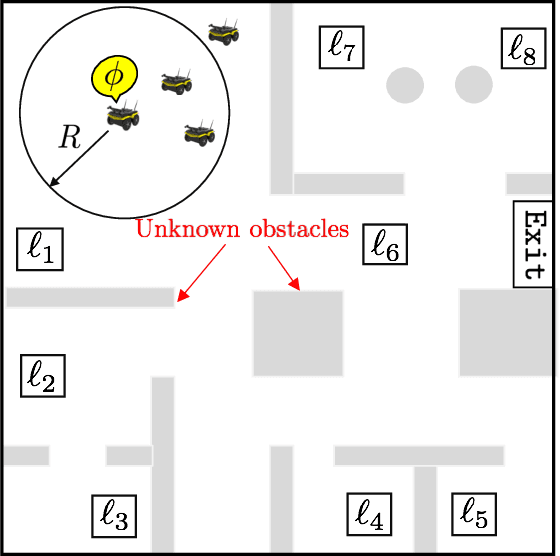
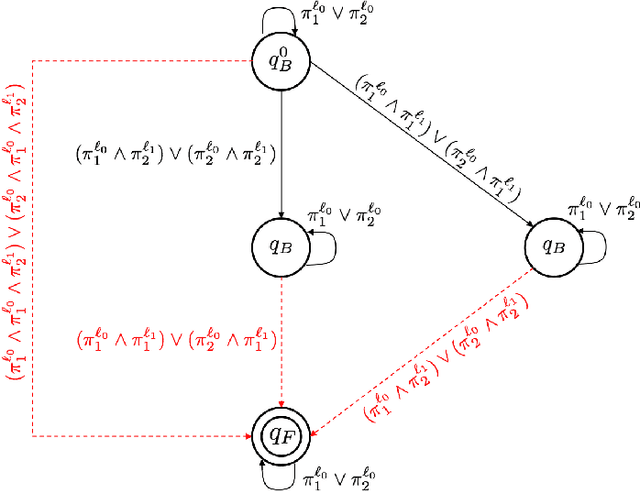
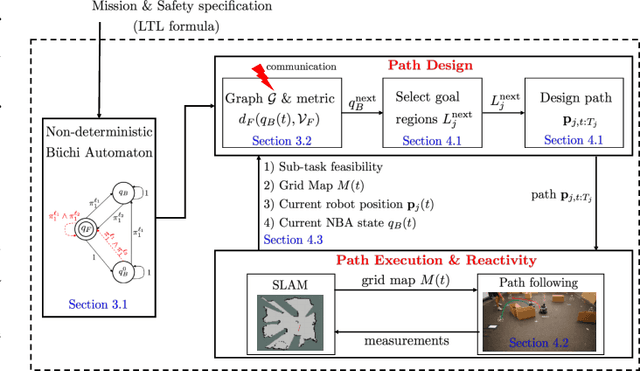
This paper proposes a new reactive temporal logic planning algorithm for multiple robots that operate in environments with unknown geometry modeled using occupancy grid maps. The robots are equipped with individual sensors that allow them to continuously learn a grid map of the unknown environment using existing Simultaneous Localization and Mapping (SLAM) methods. The goal of the robots is to accomplish complex collaborative tasks, captured by global Linear Temporal Logic (LTL) formulas. The majority of existing LTL planning approaches rely on discrete abstractions of the robot dynamics operating in known environments and, as a result, they cannot be applied to the more realistic scenarios where the environment is initially unknown. In this paper, we address this novel challenge by proposing the first reactive, abstraction-free, and distributed LTL planning algorithm that can be applied for complex mission planning of multiple robots operating in unknown environments. The proposed algorithm is reactive, i.e., planning is adapting to the updated environmental map and abstraction-free as it does not rely on designing abstractions of the robot dynamics. Also, our algorithm is distributed in the sense that the global LTL task is decomposed into single-agent reachability problems constructed online based on the continuously learned map. The proposed algorithm is complete under mild assumptions on the structure of the environment and the sensor models. We provide extensive numerical simulations and hardware experiments that illustrate the theoretical analysis and show that the proposed algorithm can address complex planning tasks for large-scale multi-robot systems in unknown environments.