 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReachable Polyhedral Marching (RPM): A Safety Verification Algorithm for Robotic Systems with Deep Neural Network Components
Paper and Code
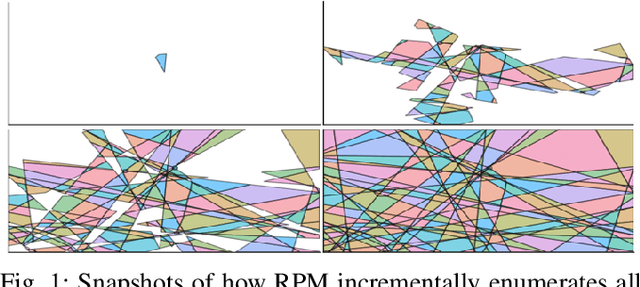
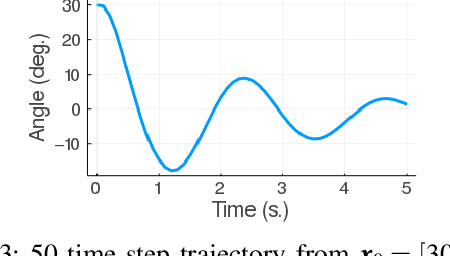
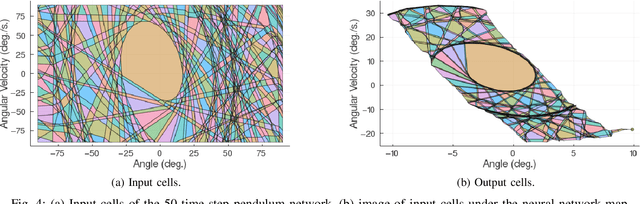
We present a method for computing exact reachable sets for deep neural networks with rectified linear unit (ReLU) activation. Our method is well-suited for use in rigorous safety analysis of robotic perception and control systems with deep neural network components. Our algorithm can compute both forward and backward reachable sets for a ReLU network iterated over multiple time steps, as would be found in a perception-action loop in a robotic system. Our algorithm is unique in that it builds the reachable sets by expanding a front of polyhedral cells in the input space, rather than iterating layer-by-layer through the network as in other methods. If an unsafe cell is found, our algorithm can return this result without completing the full reachability computation, thus giving an anytime property that accelerates safety verification. We demonstrate our algorithm on safety verification of the ACAS Xu aircraft advisory system. We find unsafe actions many times faster than the fastest existing method and certify no unsafe actions exist in about twice the time of the existing method. We also compute forward and backward reachable sets for a learned model of pendulum dynamics over a 50 time step horizon in 87s on a laptop computer. Source code for our algorithm can be found at https://github.com/StanfordMSL/Neural-Network-Reach.