 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReach Out and Help: Assisted Remote Collaboration through a Handheld Robot
Paper and Code
Oct 04, 2019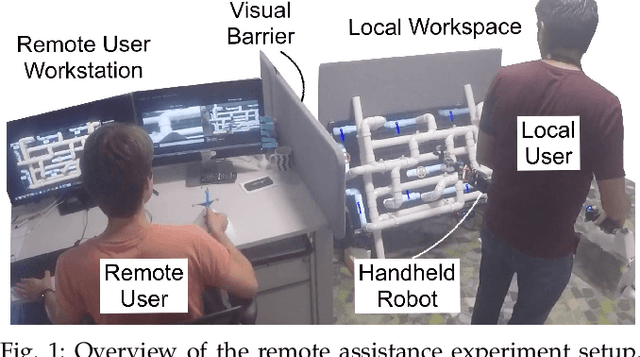

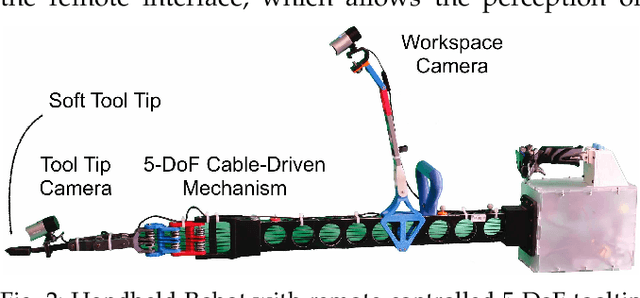
We explore a remote collaboration setup, which involves three parties: a local worker, a remote helper and a handheld robot carried by the local worker. We propose a system that allows a remote user to assist the local user through diagnosis, guidance and physical interaction as a novel aspect with the handheld robot providing task knowledge and enhanced motion and accuracy capabilities. Through experimental studies, we assess the proposed system in two different configurations: with and without the robot's assistance in terms of object interactions and task knowledge. We show that the handheld robot can mediate the helper's instructions and remote object interactions while the robot's semi-autonomous features improve task performance by 24%, reduce the workload for the remote user and decrease required communication bandwidth between both users. This study is a first attempt to evaluate how this new type of collaborative robot works in a remote assistance scenario, a setup that we believe is important to leverage current robot constraints and existing communication technologies.