Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRational Parametrization of Linear Pentapod's Singularity Variety and the Distance to it
Paper and Code
Nov 30, 2017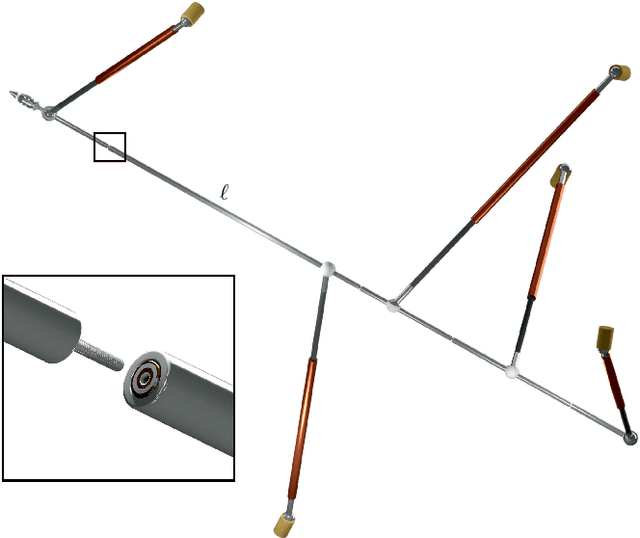
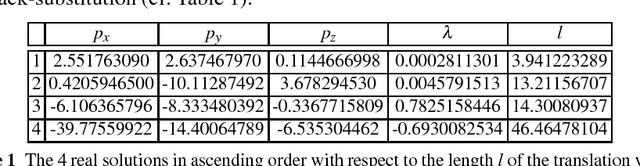
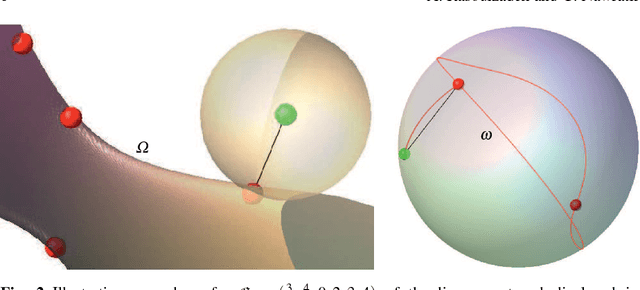
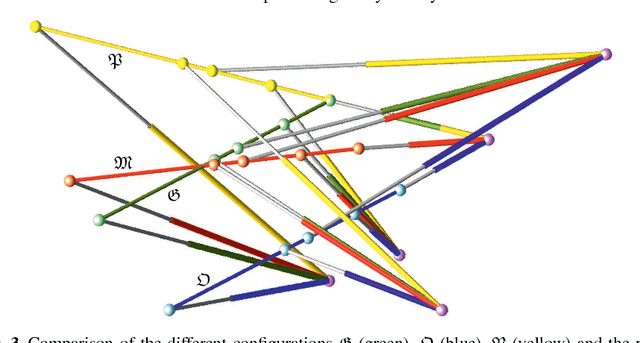
A linear pentapod is a parallel manipulator with five collinear anchor points on the motion platform (end-effector), which are connected via extendible legs to the base. This manipulator has five controllable degrees-of-freedom and the remaining one is a free rotation around the motion platform axis (which in fact is an axial spindle). In this paper we present a rational parametrization of the singularity variety of the linear pentapod. Moreover we compute the shortest distance to this rational variety with respect to a suitable metric. Kinematically this distance can be interpreted as the radius of the maximal singularity free-sphere.
View paper on