 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRainy screens: Collecting rainy datasets, indoors
Paper and Code
Mar 10, 2020

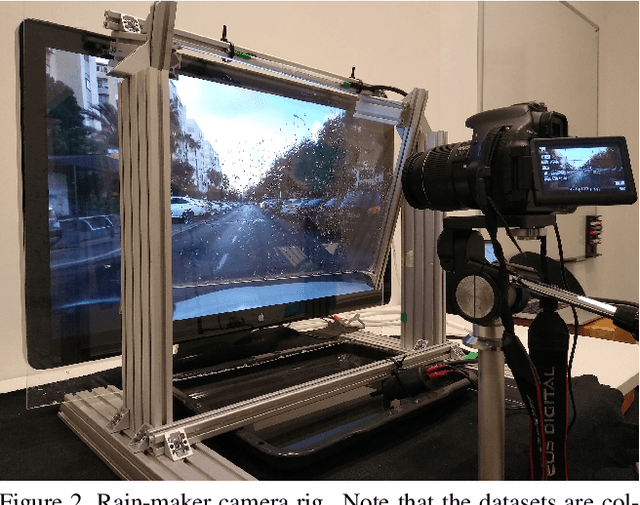
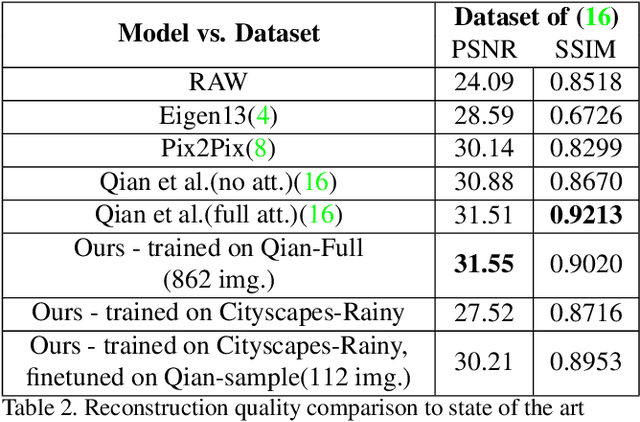
Acquisition of data with adverse conditions in robotics is a cumbersome task due to the difficulty in guaranteeing proper ground truth and synchronising with desired weather conditions. In this paper, we present a simple method - recording a high resolution screen - for generating diverse rainy images from existing clear ground-truth images that is domain- and source-agnostic, simple and scales up. This setup allows us to leverage the diversity of existing datasets with auxiliary task ground-truth data, such as semantic segmentation, object positions etc. We generate rainy images with real adherent droplets and rain streaks based on Cityscapes and BDD, and train a de-raining model. We present quantitative results for image reconstruction and semantic segmentation, and qualitative results for an out-of-sample domain, showing that models trained with our data generalize well.