 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRACER: Epistemic Risk-Sensitive RL Enables Fast Driving with Fewer Crashes
Paper and Code
May 07, 2024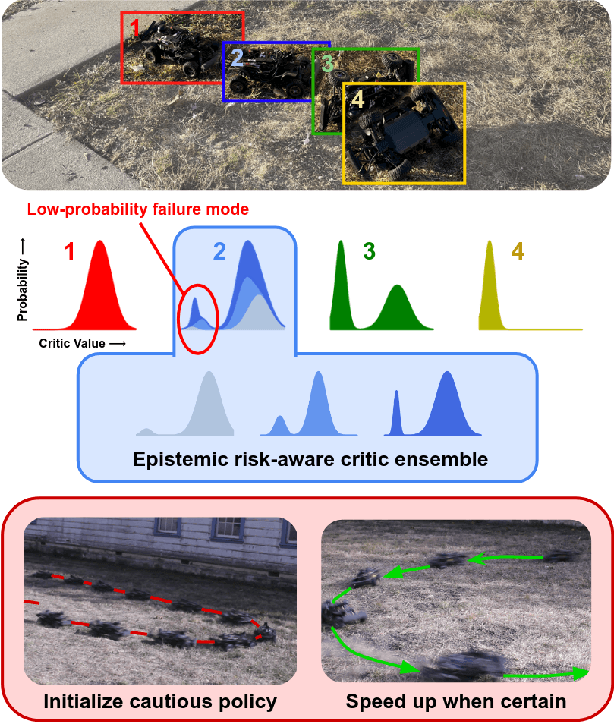
Reinforcement learning provides an appealing framework for robotic control due to its ability to learn expressive policies purely through real-world interaction. However, this requires addressing real-world constraints and avoiding catastrophic failures during training, which might severely impede both learning progress and the performance of the final policy. In many robotics settings, this amounts to avoiding certain "unsafe" states. The high-speed off-road driving task represents a particularly challenging instantiation of this problem: a high-return policy should drive as aggressively and as quickly as possible, which often requires getting close to the edge of the set of "safe" states, and therefore places a particular burden on the method to avoid frequent failures. To both learn highly performant policies and avoid excessive failures, we propose a reinforcement learning framework that combines risk-sensitive control with an adaptive action space curriculum. Furthermore, we show that our risk-sensitive objective automatically avoids out-of-distribution states when equipped with an estimator for epistemic uncertainty. We implement our algorithm on a small-scale rally car and show that it is capable of learning high-speed policies for a real-world off-road driving task. We show that our method greatly reduces the number of safety violations during the training process, and actually leads to higher-performance policies in both driving and non-driving simulation environments with similar challenges.