 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR$^2$NMPC: A Real-Time Reduced Robustified Nonlinear Model Predictive Control with Ellipsoidal Uncertainty Sets for Autonomous Vehicle Motion Control
Paper and Code
Nov 10, 2023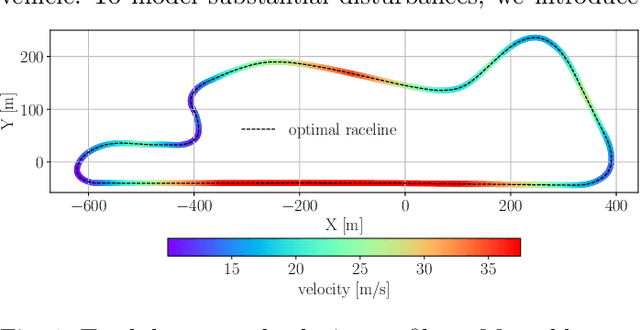
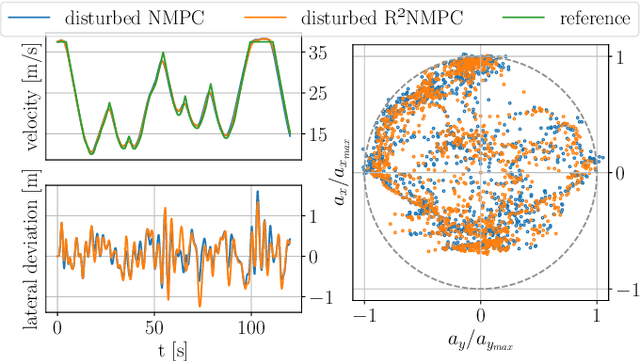
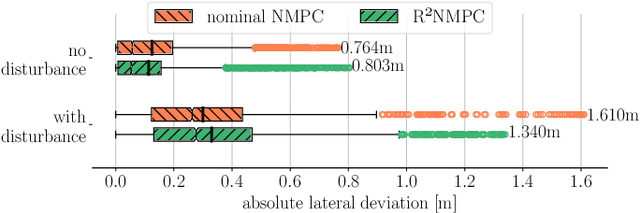
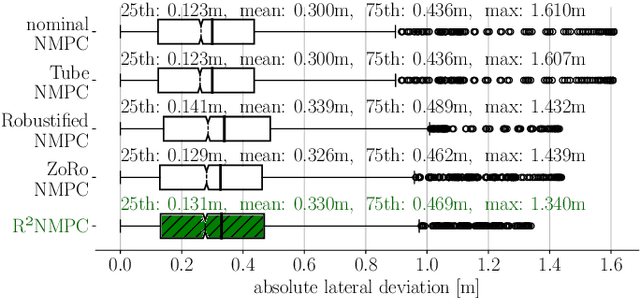
In this paper, we present a novel Reduced Robustified NMPC (R$^2$NMPC) algorithm that has the same complexity as an equivalent nominal NMPC while enhancing it with robustified constraints based on the dynamics of ellipsoidal uncertainty sets. This promises both a closed-loop- and constraint satisfaction performance equivalent to common Robustified NMPC approaches, while drastically reducing the computational complexity. The main idea lies in approximating the ellipsoidal uncertainty sets propagation over the prediction horizon with the system dynamics' sensitivities inferred from the last optimal control problem (OCP) solution, and similarly for the gradients to robustify the constraints. Thus, we do not require the decision variables related to the uncertainty propagation within the OCP, rendering it computationally tractable. Next, we illustrate the real-time control capabilities of our algorithm in handling a complex, high-dimensional, and highly nonlinear system, namely the trajectory following of an autonomous passenger vehicle modeled with a dynamic nonlinear single-track model. Our experimental findings, alongside a comparative assessment against other Robust NMPC approaches, affirm the robustness of our method in effectively tracking an optimal racetrack trajectory while satisfying the nonlinear constraints. This performance is achieved while fully utilizing the vehicle's interface limits, even at high speeds of up to 37.5m/s, and successfully managing state estimation disturbances. Remarkably, our approach maintains a mean solving frequency of 144Hz.