Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadratic mutual information regularization in real-time deep CNN models
Paper and Code
Aug 26, 2021
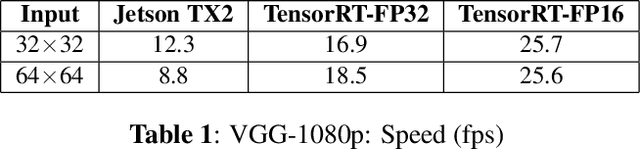

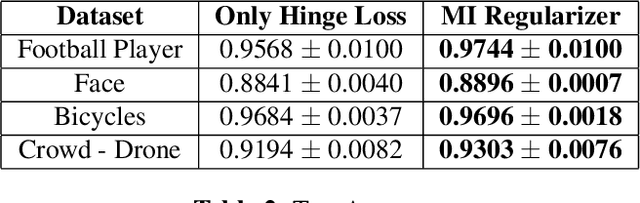
In this paper, regularized lightweight deep convolutional neural network models, capable of effectively operating in real-time on devices with restricted computational power for high-resolution video input are proposed. Furthermore, a novel regularization method motivated by the Quadratic Mutual Information, in order to improve the generalization ability of the utilized models is proposed. Extensive experiments on various binary classification problems involved in autonomous systems are performed, indicating the effectiveness of the proposed models as well as of the proposed regularizer.
* Accepted at MLSP 2020
View paper on