 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyRIDE: An Interactive Development Environment for PR2 Robot
Paper and Code
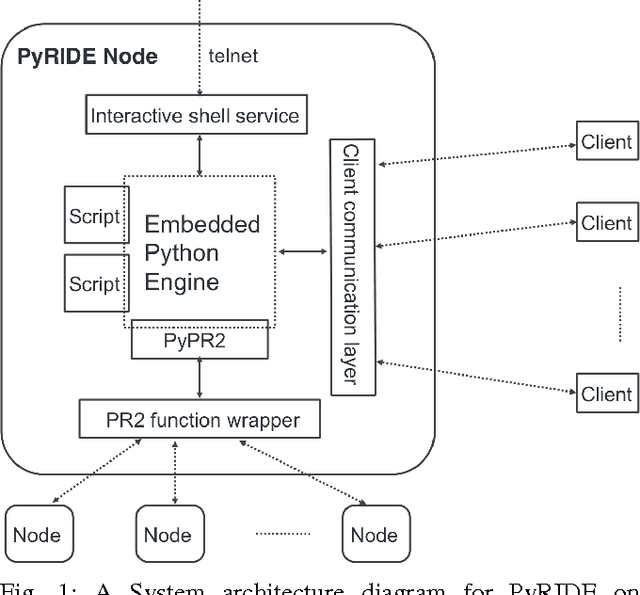
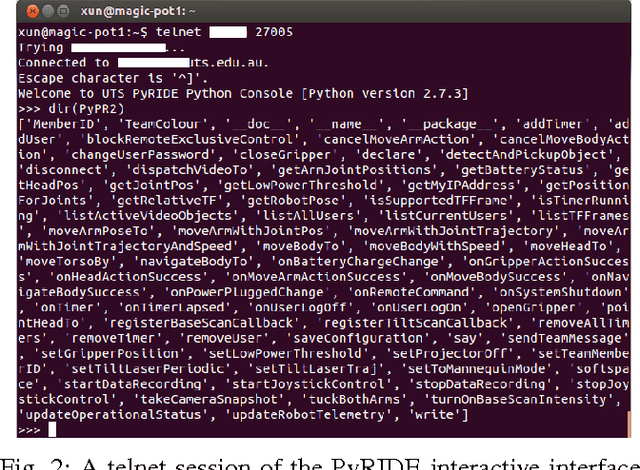
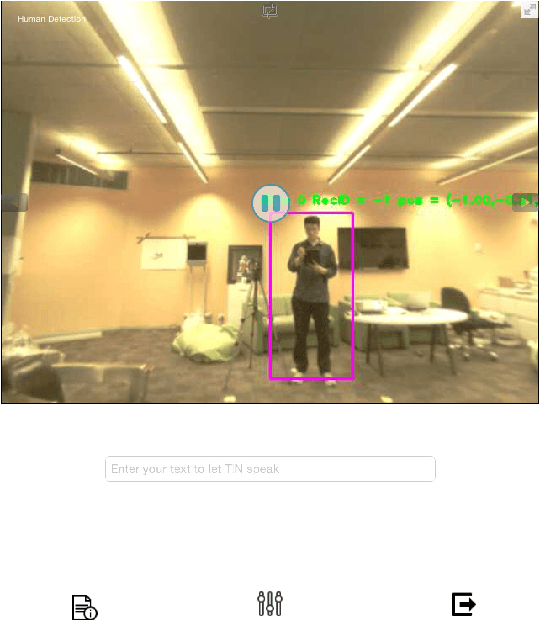
Python based Robot Interactive Development Environment (PyRIDE) is a software that supports rapid \textit{interactive} programming of robot skills and behaviours on PR2/ROS (Robot Operating System) platform. One of the key features of PyRIDE is its interactive remotely accessible Python console that allows its users to program robots \textit{online} and in \textit{realtime} in the same way as using the standard Python interactive interpreter. It allows programs to be modified while they are running. PyRIDE is also a software integration framework that abstracts and aggregates disparate low level ROS software modules, e.g. arm joint motor controllers, and exposes their functionalities through a unified Python programming interface. PR2 programmers are able to experiment and develop robot behaviours without dealing with specific details of accessing underlying softwares and hardwares. PyRIDE provides a client-server mechanism that allows remote user access of the robot functionalities, e.g. remote robot monitoring and control, access real-time robot camera image data etc. This enables multi-modal human robot interactions using different devices and user interfaces. All these features are seamlessly integrated into one lightweight and portable middleware package. In this paper, we use four real life scenarios to demonstrate PyRIDE key features and illustrate the usefulness of software.