 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvident Vehicle Detection at Night for Advanced Driver Assistance Systems
Paper and Code


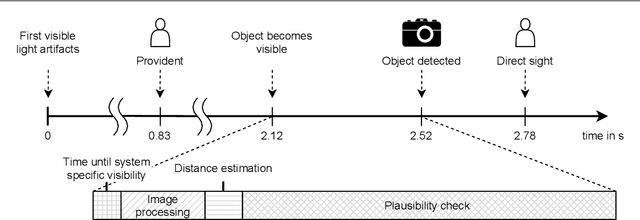
In recent years, computer vision algorithms have become more and more powerful, which enabled technologies such as autonomous driving to evolve with rapid pace. However, current algorithms mainly share one limitation: They rely on directly visible objects. This is a major drawback compared to human behavior, where indirect visual cues caused by the actual object (e.g., shadows) are already used intuitively to retrieve information or anticipate occurring objects. While driving at night, this performance deficit becomes even more obvious: Humans already process the light artifacts caused by oncoming vehicles to assume their future appearance, whereas current object detection systems rely on the oncoming vehicle's direct visibility. Based on previous work in this subject, we present with this paper a complete system capable of solving the task to providently detect oncoming vehicles at nighttime based on their caused light artifacts. For that, we outline the full algorithm architecture ranging from the detection of light artifacts in the image space, localizing the objects in the three-dimensional space, and verifying the objects over time. To demonstrate the applicability, we deploy the system in a test vehicle and use the information of providently detected vehicles to control the glare-free high beam system proactively. Using this experimental setting, we quantify the time benefit that the provident vehicle detection system provides compared to an in-production computer vision system. Additionally, the glare-free high beam use case provides a real-time and real-world visualization interface of the detection results. With this contribution, we want to put awareness on the unconventional sensing task of provident object detection and further close the performance gap between human behavior and computer vision algorithms in order to bring autonomous and automated driving a step forward.