Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Efficient Exploration for RL with Unsupervised Learning
Paper and Code
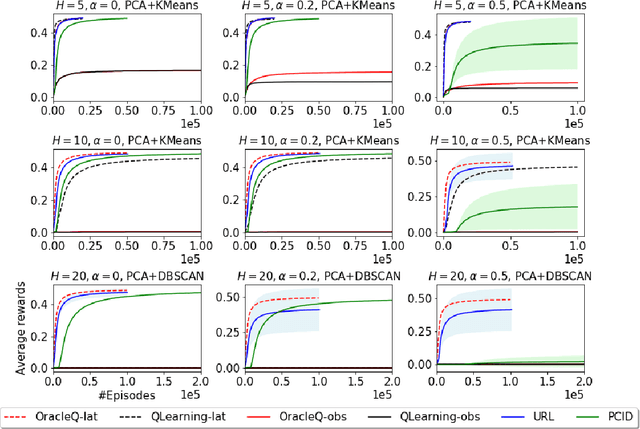
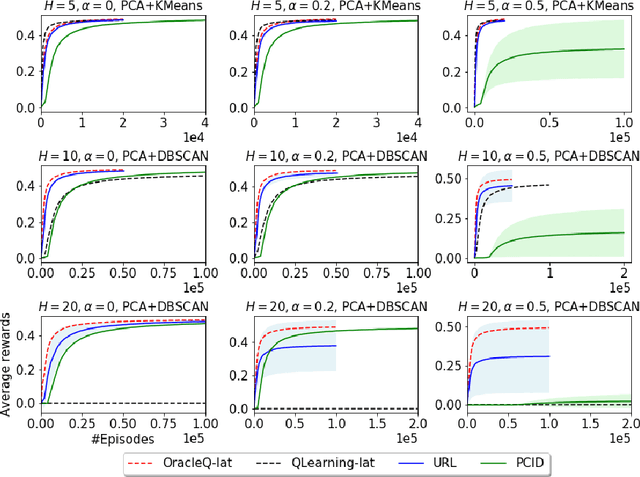
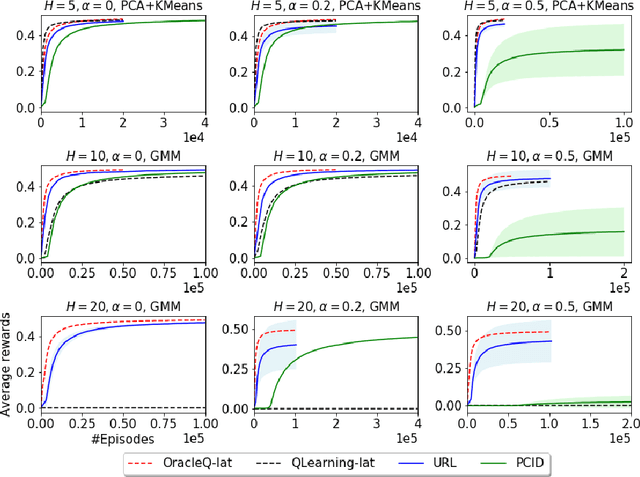
We study how to use unsupervised learning for efficient exploration in reinforcement learning with rich observations generated from a small number of latent states. We present a novel algorithmic framework that is built upon two components: an unsupervised learning algorithm and a no-regret reinforcement learning algorithm. We show that our algorithm provably finds a near-optimal policy with sample complexity polynomial in the number of latent states, which is significantly smaller than the number of possible observations. Our result gives theoretical justification to the prevailing paradigm of using unsupervised learning for efficient exploration [tang2017exploration,bellemare2016unifying].
View paper on