 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvable Representation with Efficient Planning for Partially Observable Reinforcement Learning
Paper and Code
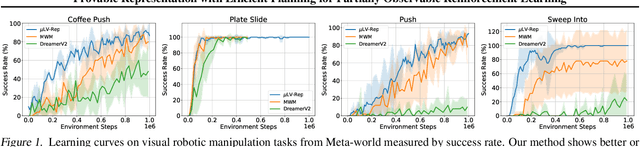
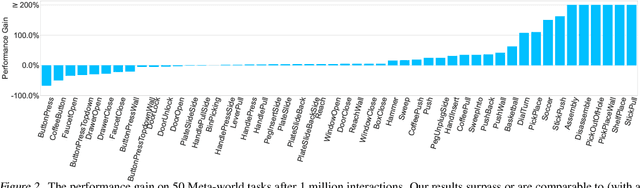
In real-world reinforcement learning problems, the state information is often only partially observable, which breaks the basic assumption in Markov decision processes, and thus, leads to inferior performances. Partially Observable Markov Decision Processes have been introduced to explicitly take the issue into account for learning, exploration, and planning, but presenting significant computational and statistical challenges. To address these difficulties, we exploit the representation view, which leads to a coherent design framework for a practically tractable reinforcement learning algorithm upon partial observations. We provide a theoretical analysis for justifying the statistical efficiency of the proposed algorithm. We also empirically demonstrate the proposed algorithm can surpass state-of-the-art performance with partial observations across various benchmarks, therefore, pushing reliable reinforcement learning towards more practical applications.