 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProto-MPC: An Encoder-Prototype-Decoder Approach for Quadrotor Control in Challenging Winds
Paper and Code
Jan 27, 2024
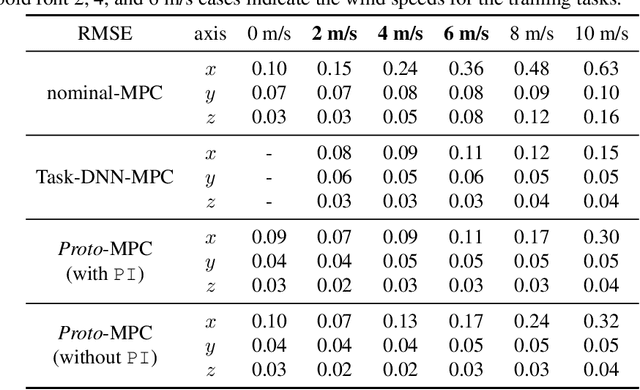
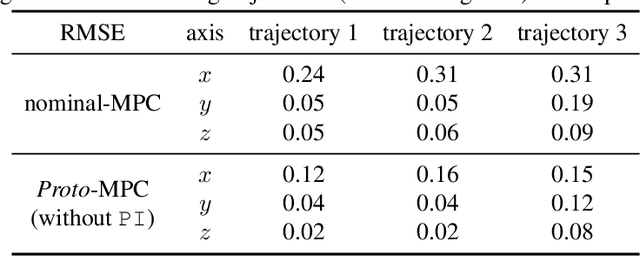

Quadrotors are increasingly used in the evolving field of aerial robotics for their agility and mechanical simplicity. However, inherent uncertainties, such as aerodynamic effects coupled with quadrotors' operation in dynamically changing environments, pose significant challenges for traditional, nominal model-based control designs. We propose a multi-task meta-learning method called Encoder-Prototype-Decoder (EPD), which has the advantage of effectively balancing shared and distinctive representations across diverse training tasks. Subsequently, we integrate the EPD model into a model predictive control problem (Proto-MPC) to enhance the quadrotor's ability to adapt and operate across a spectrum of dynamically changing tasks with an efficient online implementation. We validate the proposed method in simulations, which demonstrates Proto-MPC's robust performance in trajectory tracking of a quadrotor being subject to static and spatially varying side winds.